Personal Fabrication Research in HCI and Graphics: An Overview of Related Work
Webpage maintained by Stefanie Mueller, Parinya Punpongsanon, Dishita Turakhia, M. Doga Dogan, Faraz Faruqi, and Yunyi Zhu. HCI Engineering Group, MIT CSAIL For feedback and changes, please email: stefanie.mueller/at/mit.edu
The goal of this website is to provide a resource for newcomers in the field of computational fabrication so that they can quickly access recent contributions made in the field.
This webpage serves as a related work directory - the creators of this webpage do not hold the rights for these works, please contact the authors directly.
Personal Fabrication
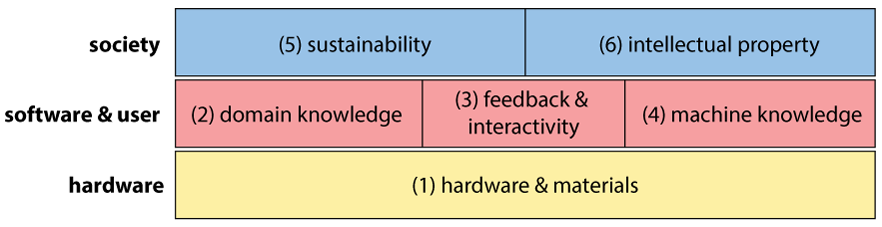
In this journal paper, we survey the related work in HCI and Computer Graphics over the last five years and
provide a roadmap for future research. The question we try to answer is whether the technology will further
progress towards consumers, which would allow the technology to scale from hundreds of thousands of users to
hundreds of millions of users. Our analysis reveals that a transition to consumers first requires a hardware +
software system that embodies the skills and expert knowledge that consumers lack [...]
DOI
PDF
2022

Shape-Haptics: Planar & Passive Force Feedback Mechanisms for Physical Interfaces (ACM CHI 2022)
We present Shape-Haptics, an approach for designers to rapidly design and fabricate passive force feedback mechanisms for physical interfaces. Such mechanisms are used in everyday interfaces and tools, and they are challenging to design. Shape-Haptics abstracts and broadens the haptic expression of this class of force feedback systems through 2D laser cut configurations that are simple to fabricate. They leverage the properties of polyoxymethylene plastic and comprise a compliant spring structure that engages with a sliding profile during tangible interaction. By shaping the sliding profile, designers can easily customize the haptic force feedback delivered by the mechanism. We provide a computational design sandbox to facilitate designers to explore and fabricate Shape-Haptics mechanisms. We also propose a series of applications that demonstrate the utility of Shape-Haptics in creating and customizing haptics for different physical interfaces.
DOI
PDF
Video
Page
FlexHaptics: A Design Method for Passive Haptic Inputs Using Planar Compliant Structures (ACM CHI 2022)
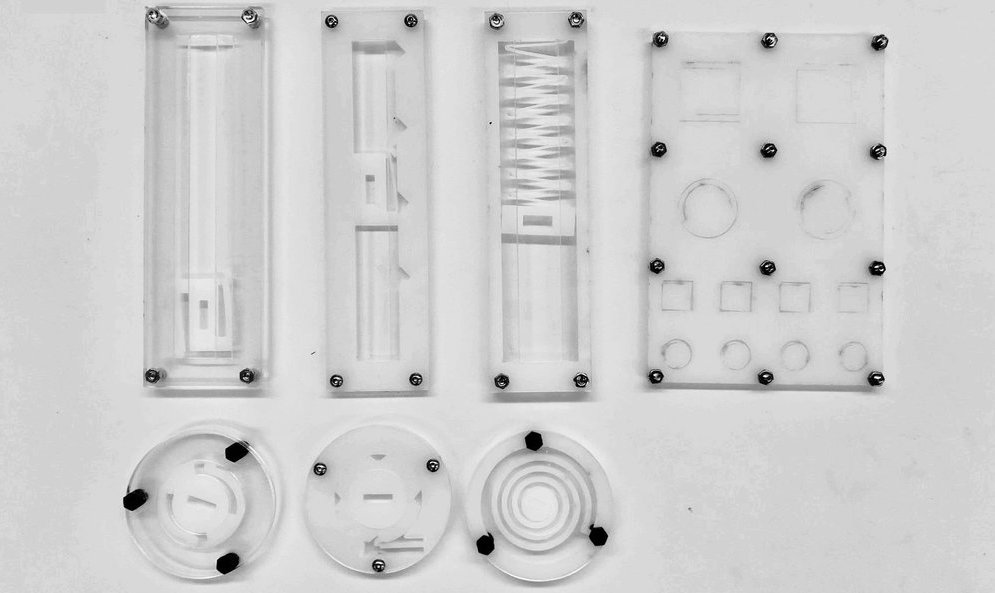
This paper presents FlexHaptics, a design method for creating custom haptic input interfaces. Our approach leverages planar compliant structures whose force-deformation relationship can be altered by adjusting the geometries. Embedded with such structures, a FlexHaptics module exerts a fine-tunable haptic effect (i.e., resistance, detent, or bounce) along a movement path (i.e., linear, rotary, or ortho-planar). These modules can work separately or combine into an interface with complex movement paths and haptic effects. To enable the parametric design of FlexHaptic modules, we provide a design editor that converts user-specified haptic properties into underlying mechanical structures of haptic modules. We validate our approach and demonstrate the potential of FlexHaptic modules through six application examples, including a slider control for a painting application and a piano keyboard interface on touchscreens, a tactile low vision timer, VR game controllers, and a compound input device of a joystick and a two-step button.
DOI
PDF
Video
Page
ReCompFig: Designing Dynamically Reconfigurable Kinematic Devices Using Compliant Mechanisms and Tensioning Cables (ACM CHI 2022)
From creating input devices to rendering tangible information, the field of HCI is interested in using kinematic mechanisms to create human-computer interfaces. Yet, due to fabrication and design challenges, it is often difficult to create kinematic devices that are compact and have multiple reconfigurable motional degrees of freedom (DOFs) depending on the interaction scenarios. In this work, we combine compliant mechanisms (CMs) with tensioning cables to create dynamically reconfigurable kinematic mechanisms. The devices’ kinematics (DOFs) is enabled and determined by the layout of bendable rods. The additional cables function as on-demand motion constraints that can dynamically lock or unlock the mechanism's DOFs as they are tightened or loosened. We provide algorithms and a design tool prototype to help users design such kinematic devices. We also demonstrate various HCI use cases including a kinematic haptic display, a haptic proxy, and a multimodal input device.
DOI
PDF
Video
Page
HydroMod : Constructive Modules for Prototyping Hydraulic Physical Interfaces (ACM CHI 2022)
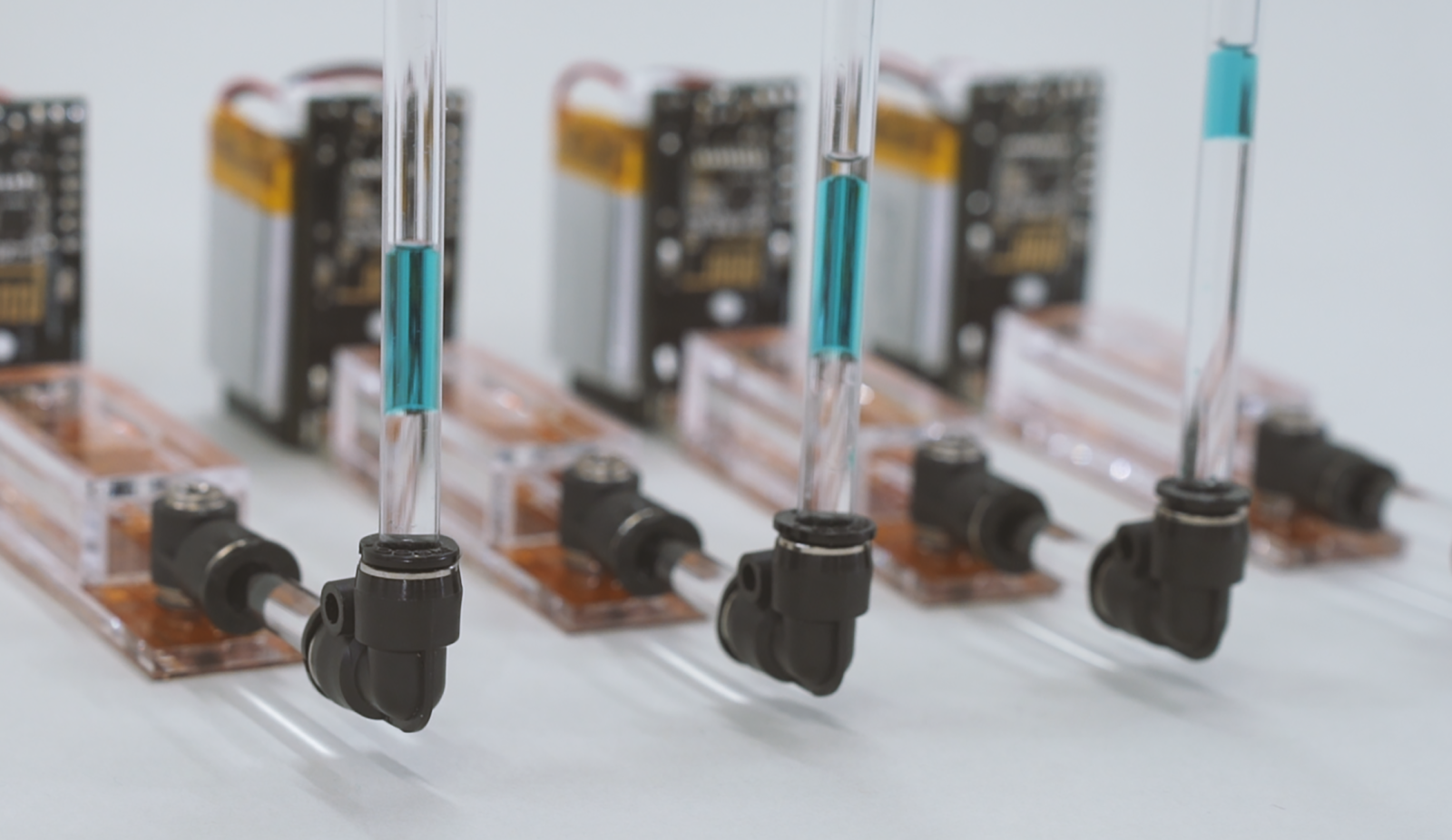
In recent years, actuators that handle fluids such as gases and liquids have been attracting attention for their applications in soft robots and shape-changing interfaces. In the field of HCI, there have been various inflatable prototyping tools that utilize air control, however, very few tools for liquid control have been developed. In this study, we propose HydroMod, new constructive modules that can easily generate liquid flow and programmatically control liquid flow, with the aim of lowering the barrier to entry for prototyping with liquids. HydroMod consists of palm-sized small modules, which can generate liquid flow with the electrohydrodynamics (EHD) phenomenon by simply connecting the modules. Moreover, users can configure and control the flow path by simply recombining the modules. In this paper, we propose the design of the modules, evaluate the performance of HydroMod as a fluid system, and also show the possible application scenarios of fluid prototyping using this system.
DOI
PDF
Video
Page
(Dis)Appearables: A Concept and Method for Actuated Tangible UIs to Appear and Disappear based on Stages (ACM CHI 2022)
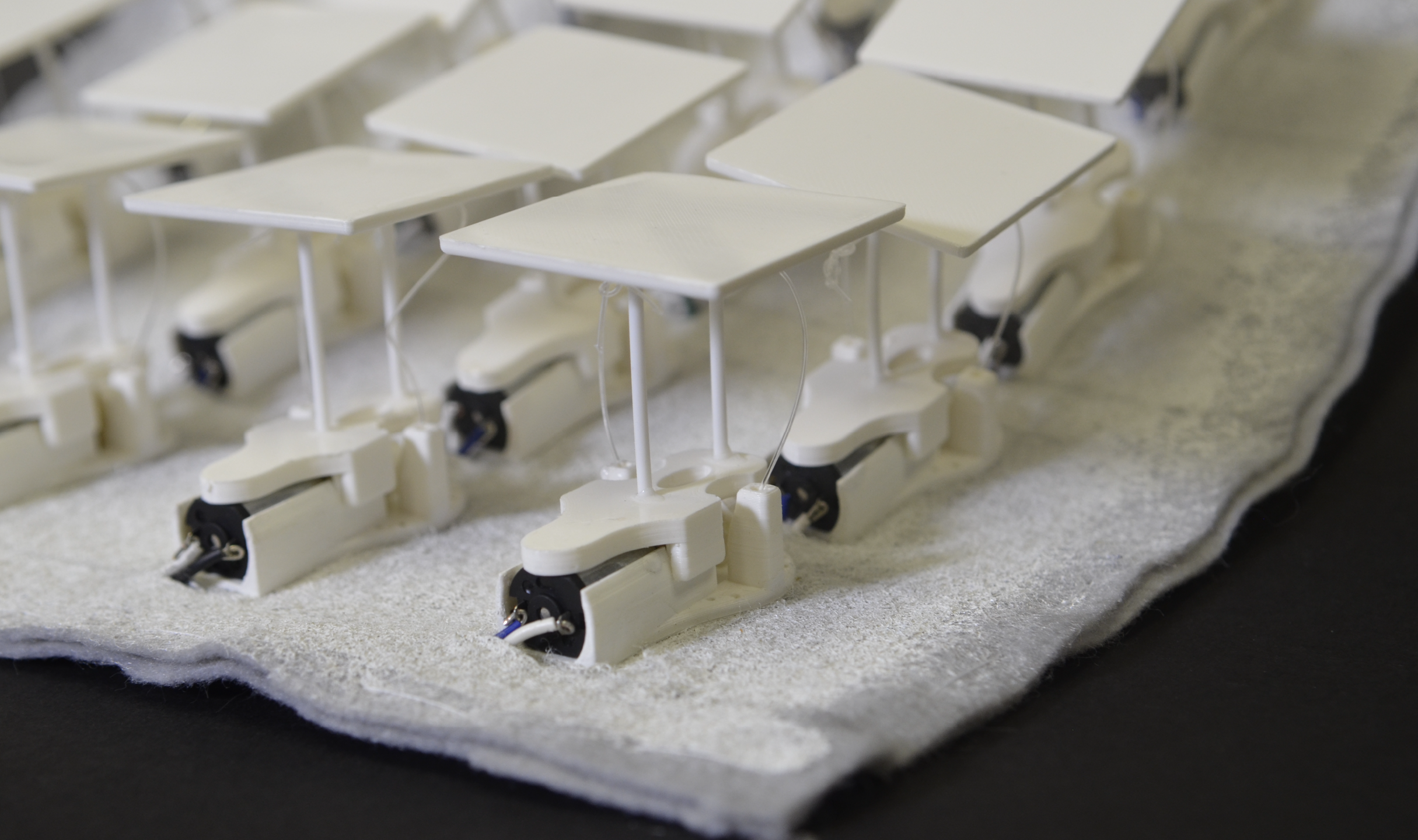
(Dis)Appearables is an approach for actuated Tangible User Interfaces (TUIs) to appear and disappear. This technique is supported by Stages: physical platforms inspired by theatrical stages. Self-propelled TUI’s autonomously move between front and back stage allowing them to dynamically appear and disappear from users’ attention. This platform opens up a novel interaction design space for expressive displays with dynamic physical affordances. We demonstrate and explore this approach based on a proof-of-concept implementation using two-wheeled robots, and multiple stage design examples. We have implemented a stage design pipeline which allows users to plan and design stages that are composed with front and back stages, and transition portals such as trap doors or lifts. The pipeline includes control of the robots, which guides them on and off stage. With this proof-of-concept prototype, we demonstrated a range of applications including interactive mobility simulation, self re-configuring desktops, remote hockey, and storytelling/gaming. Inspired by theatrical stage designs, this is a new take on ‘controlling the existence of matter’ for user experience design.
DOI
PDF
Video
Page
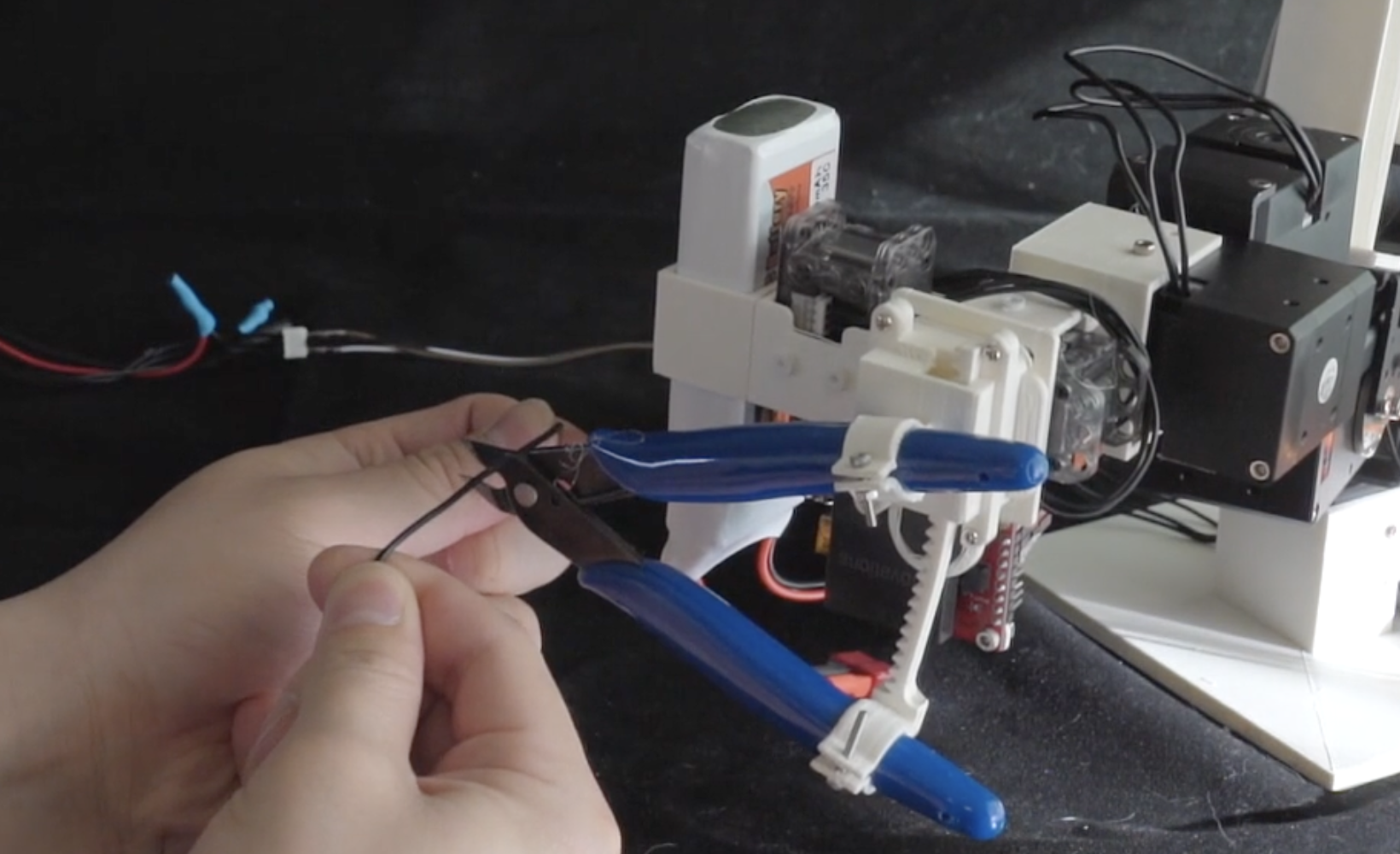
Roman: Making Everyday Objects Robotically Manipulable with 3D-Printable Add-on Mechanisms (ACM CHI 2022)
One important vision of robotics is to provide physical assistance by manipulating different everyday objects, e.g., hand tools, kitchen utensils. However, many objects designed for dexterous hand-control are not easily manipulable by a single robotic arm with a generic parallel gripper. Complementary to existing research on developing grippers and control algorithms, we present Roman, a suite of hardware design and software tool support for robotic engineers to create 3D printable mechanisms attached to everyday handheld objects, making them easier to be manipulated by conventional robotic arms. The Roman hardware comes with a versatile magnetic gripper that can snap on/off handheld objects and drive add-on mechanisms to perform tasks. Roman also provides software support to register and author control programs. To validate our approach, we designed and fabricated Roman mechanisms for 14 everyday objects/tasks presented within a design space and conducted expert interviews with robotic engineers indicating that Roman serves as a practical alternative for enabling robotic manipulation of everyday objects.
DOI
PDF
Video
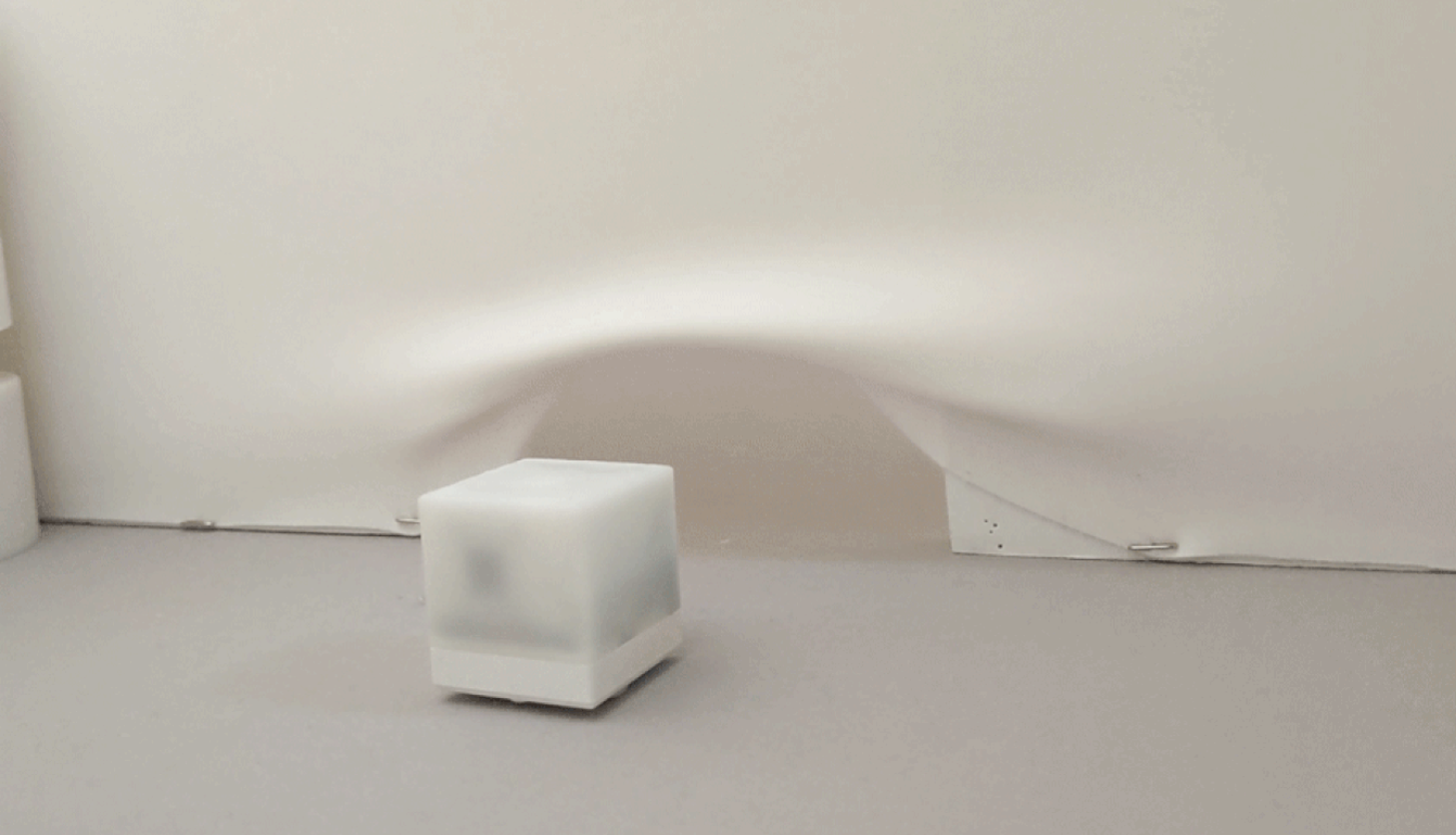
Exploring Situated & Embodied Support for Youth's Mental Health: Design Opportunities for Interactive Tangible Devices (ACM CHI 2022)
The ability to manage emotions effectively is critical to healthy psychological and social development in youth. Prior work has focused on investigating the design of mental health technologies for this population, yet it is still unclear how to help them cope with emotionally difficult situations in-the-moment. In this paper, we aim to explore the appropriation, naturally emerging engagement patterns, and perceived psychological impact of an exemplar interactive tangible device intervention designed to provide in-situ support, when deployed with n=109 youth for 1.5 months. Our findings from semi-structured interviews and co-design workshops with a subset of participants (n=44 and n=25, respectively) suggest the potential of using technology-enabled objects to aid with down-regulation and self-compassion in moments of heightened emotion, to facilitate the practice of cognitive strategies, and to act as emotional companions. Lastly, we discuss design opportunities for integrating situated and embodied support in mental health interventions for youth.
DOI
PDF
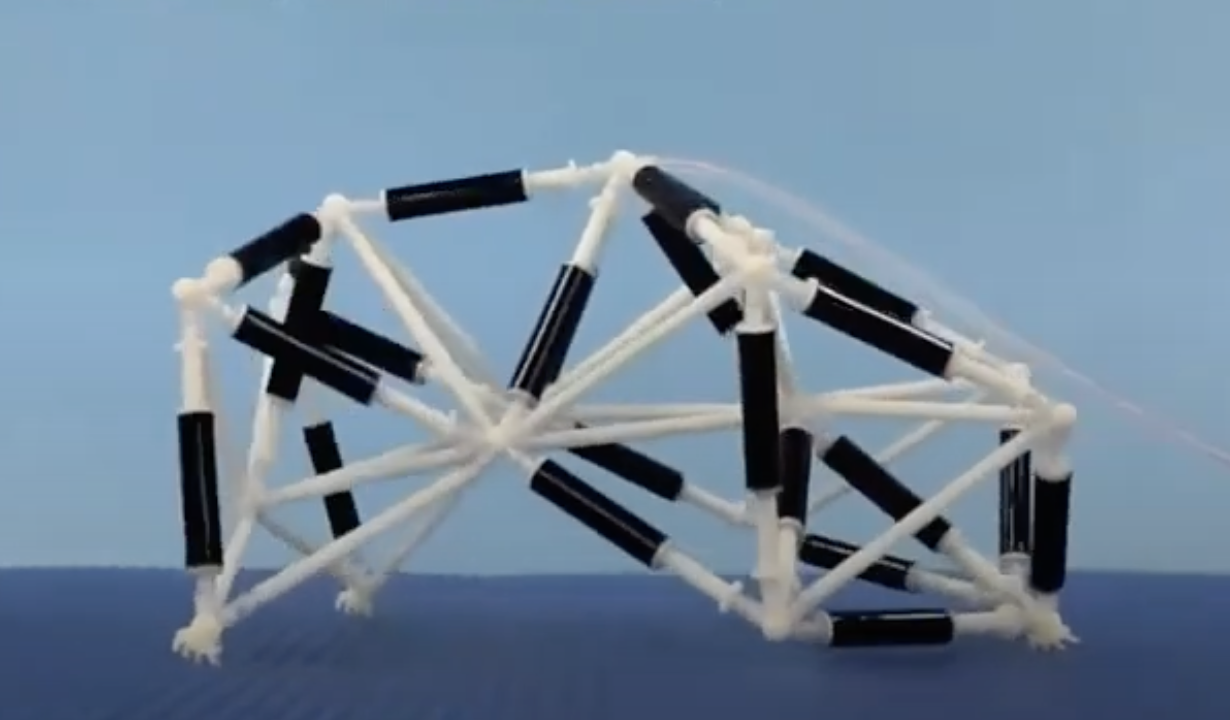
PneuMesh: Pneumatic-driven Truss-based Shape Changing System (ACM CHI 2022)
From transoceanic bridges to large-scale installations, truss structures have been known for their structural stability and shape complexity. In addition to the advantages of static trusses, truss structures have a large degree of freedom to change shape when equipped with rotatable joints and retractable beams. However, it is difficult to design a complex motion and build a control system for large numbers of trusses. In this paper, we present PneuMesh, a novel truss-based shape-changing system that is easy to design and build but still able to achieve a range of tasks. PneuMesh accomplishes this by introducing an air channel connection strategy and reconfigurable constraint design that drastically decreases the number of control units without losing the complexity of shape-changing. We develop a design tool with real-time simulation to assist users in designing the shape and motion of truss-based shape-changing robots and devices. A design session with seven participants demonstrates that PneuMesh empowers users to design and build truss structures with a wide range of shapes and various functional motions.
DOI
PDF
Video
Interaction with Touch-Sensitive Knitted Fabrics: User Perceptions and Everyday Use Experiments (ACM CHI 2022)
Recent work has investigated the construction of touch-sensitive knitted fabrics, capable of being manufactured at scale, and having only two connections to external hardware. Additionally, several sensor design patterns and application prototypes have been introduced. Our aim is to start shaping the future of this technology according to user expectations. Through a formative focus group study, we explore users’ views of using these fabrics in different contexts and discuss potential concerns and application areas. Subsequently, we take steps toward addressing relevant questions, by first providing design guidelines for application designers. Furthermore, in one user study, we demonstrate that it is possible to distinguish different swipe gestures and identify accidental contact with the sensor, a common occurrence in everyday life. We then present experiments investigating the effect of stretching and laundering of the sensors on their resistance, providing insights about considerations necessary to include in computational models.
DOI
PDF
Video

Embr: A Creative Framework for Hand Embroidered Liquid Crystal Textile Displays (ACM CHI 2022)
Conductive thread is a common material in e-textile toolkits that allows practitioners to create connections between electronic components sewn on fabric. When powered, conductive threads are used as resistive heaters to activate thermochromic dyes or pigments on textiles to create interactive, aesthetic, and ambient textile displays. In this work, we introduce Embr, a creative framework for supporting hand-embroidered liquid crystal textile displays (LCTDs). This framework includes a characterization of conductive embroidery stitches, an expanded repertoire of thermal formgiving techniques, and a thread modeling tool used to simulate mechanical, thermal, and electrical behaviors of LCTDs. Through exemplar artifacts, we annotate a morphological design space of LCTDs and discuss the tensions and opportunities of satisfying the wider range of electrical, craft, cultural, aesthetic, and functional concerns inherent to e-textile practices.
DOI
PDF
Video
Page

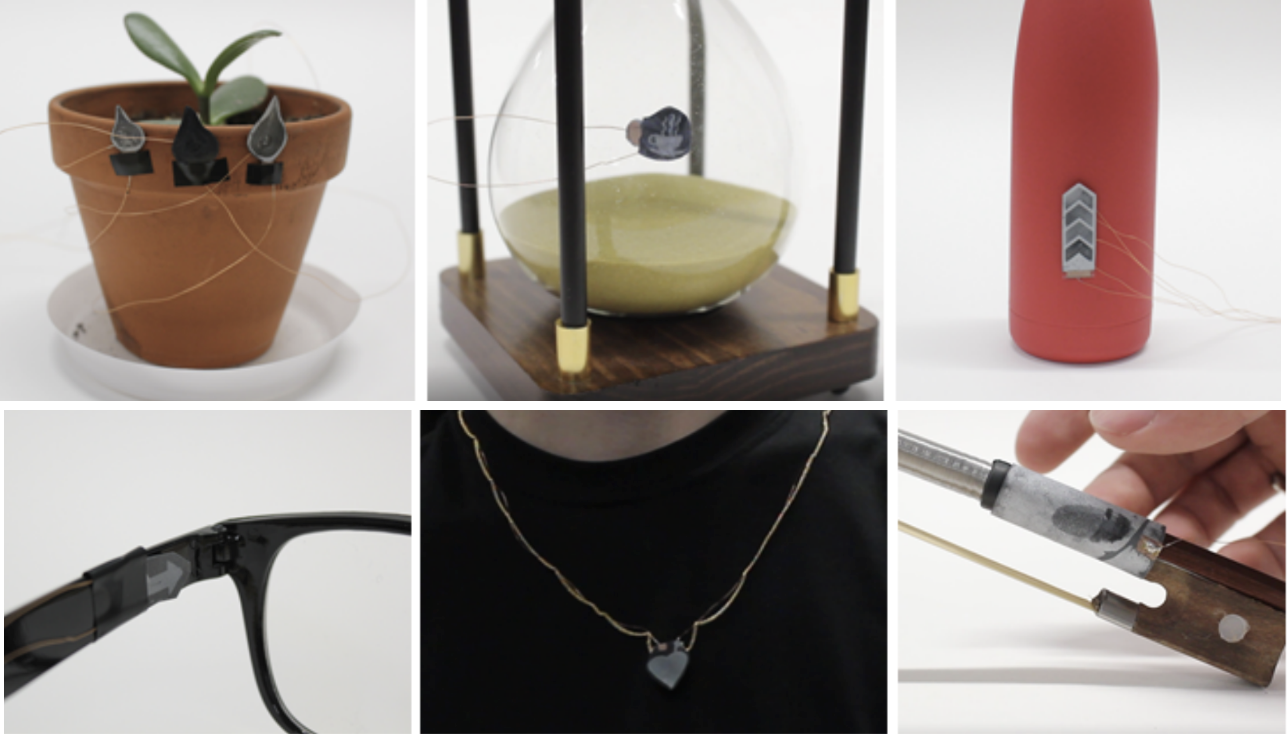
Towards Decomposable Interactive Systems: Design of a Backyard-Degradable Wireless Heating Interface (ACM CHI 2022)
Sustainability is critical to our planet and thus our designs. Within HCI, there is a tension between the desire to create interactive electronic systems and sustainability. In this paper, we present the design of an interactive system comprising components that are entirely decomposable. We leverage the inherent material properties of natural materials, such as paper, leaf skeletons, and chitosan, along with silver nanowires to create a new system capable of being electrically controlled as a portable heater. This new decomposable system, capable of wirelessly heating to >70°C, is flexible, lightweight, low-cost, and reusable, and it maintains its functionality over long periods of heating and multiple power cycles. We detail its design and present a series of use cases, from enabling a novel resealable packaging system to acting as a catalyst for shape-changing designs and beyond. Finally, we highlight the important decomposable property of the interactive system when it meets end-of-life.
DOI
PDF
Video
Page
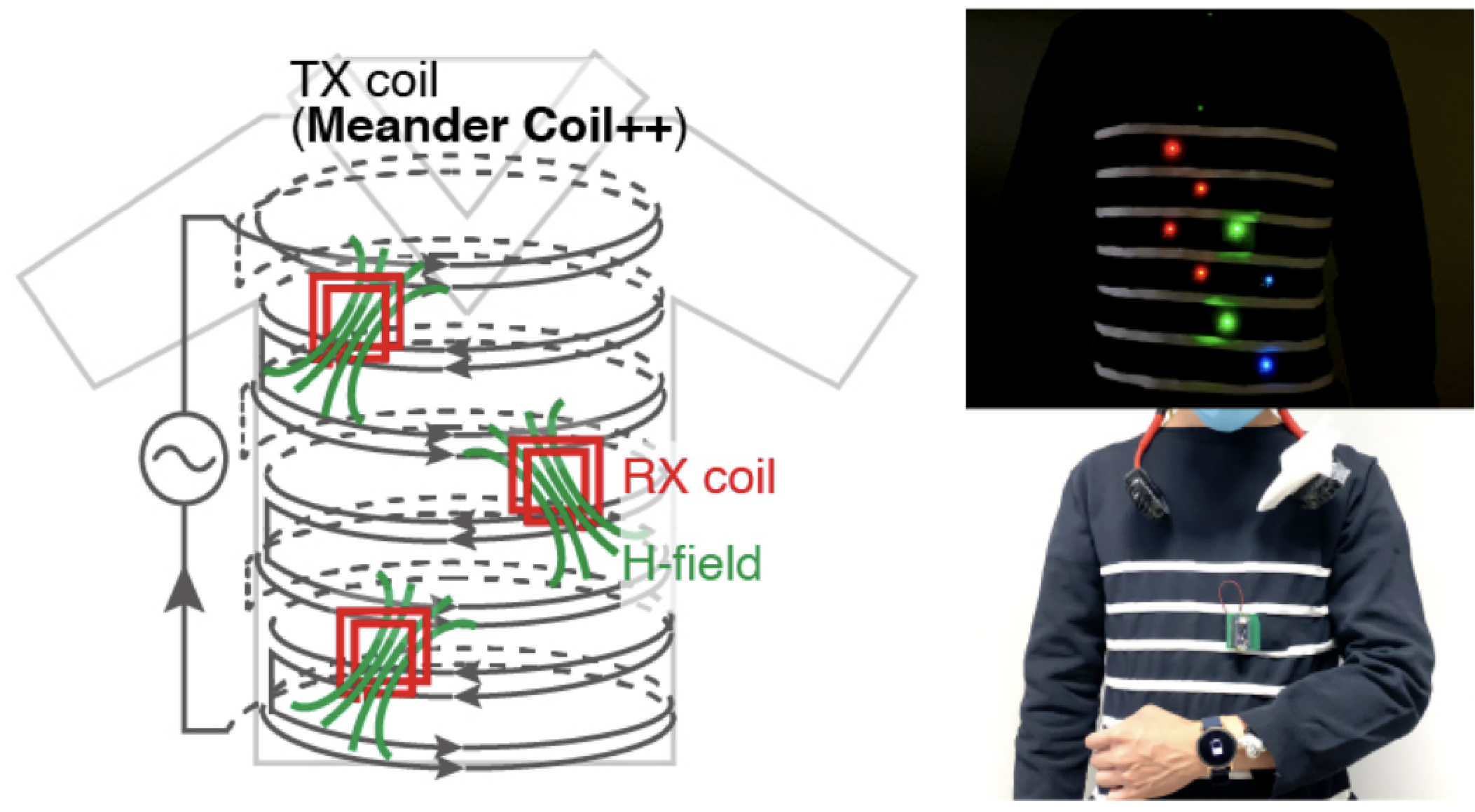
Meander Coil++: A Body-scale Wireless Power Transmission Using Safe-to-body and Energy-efficient Transmitter Coil (ACM CHI 2022)
Wearable devices for life-logging and healthcare have been studied, but the need for frequent charging imposes inconvenience for long-term use. Integrating textile-based wireless chargers (i.e., coil) into clothing enables sustainable wearable computing by charging the on-body devices in use. However, the electromagnetic field generated by conventional coil chargers strongly interferes with human body, and the high resistance of conductive threads leads to inefficient power delivery. This paper presents Meander Coil++, enabling safe, energy-efficient, and body-scale wireless power delivery. Meander Coil++ uses a wiring pattern that suppresses electromagnetic exposure to the human body without compromising power delivery performance and a liquid-metal-based low-loss conductive cord. With these advancements, Meander Coil++ transmits a few watts of power to on-body devices at 25% DC-to-DC efficiency while complying with international safety guidelines regarding electromagnetic exposure. We envision Meander Coil++ can maintain multiple devices on body for weeks beyond the confines of their small battery capacity.
DOI
PDF
Video
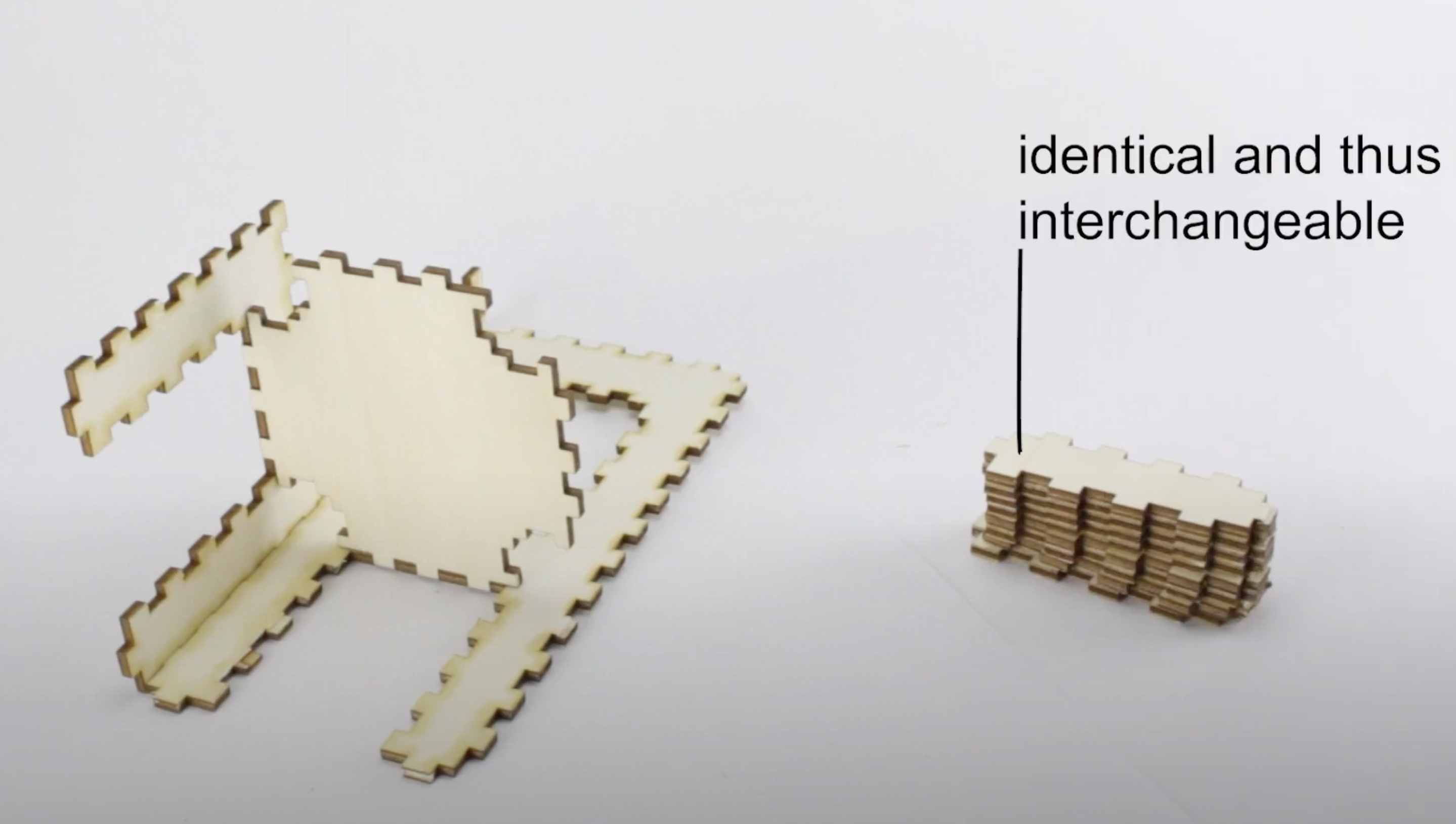
FoolProofJoint: Reducing Assembly Errors of Laser Cut 3D Models by Means of Custom Joint Patterns (ACM CHI 2022)
We present FoolProofJoint, a software tool that simplifies the assembly of laser-cut 3D models and reduces the risk of erroneous assembly. FoolProofJoint achieves this by modifying finger joint patterns. Wherever possible, FoolProofJoint makes similar looking pieces fully interchangeable, thereby speeding up the user's visual search for a matching piece. When that is not possible, FoolProofJoint gives finger joints a unique pattern of individual finger placements so as to fit only with the correct piece, thereby preventing erroneous assembly. In our benchmark set of 217 laser-cut 3D models downloaded from kyub.com, FoolProofJoint made groups of similar looking pieces fully interchangeable for 65% of all groups of similar pieces; FoolProofJoint fully prevented assembly mistakes for 97% of all models.
DOI
PDF
Video
Page

InfraredTags: Embedding Invisible AR Markers and Barcodes Using Low-Cost, Infrared-Based 3D Printing and Imaging Tools (ACM CHI 2022)
Existing approaches for embedding unobtrusive tags inside 3D objects require either complex fabrication or high-cost imaging equipment. We present InfraredTags, which are 2D markers and barcodes imperceptible to the naked eye that can be 3D printed as part of objects, and detected rapidly by low-cost near-infrared cameras. We achieve this by printing objects from an infrared-transmitting filament, which infrared cameras can see through, and by having air gaps inside for the tag’s bits, which appear at a different intensity in the infrared image. We built a user interface that facilitates the integration of common tags (QR codes, ArUco markers) with the object geometry to make them 3D printable as InfraredTags. We also developed a low-cost infrared imaging module that augments existing mobile devices and decodes tags using our image processing pipeline. Our evaluation shows that the tags can be detected with little near-infrared illumination (0.2lux) and from distances as far as 250cm. We demonstrate how our method enables various applications, such as object tracking and embedding metadata for augmented reality and tangible interactions.
DOI
PDF
Video
Page

Print-A-Sketch: A Handheld Printer for Physical Sketching of Circuits and Sensors on Everyday Surfaces (ACM CHI 2022)
We present Print-A-Sketch, an open-source handheld printer prototype for sketching circuits and sensors. Print-A-Sketch combines desirable properties from free-hand sketching and functional electronic printing. Manual human control of large strokes is augmented with computer control of fine detail. Shared control of Print-A-Sketch supports sketching interactive interfaces on everyday objects – including many objects with materials or sizes which otherwise are difficult to print on. We present an overview of challenges involved in such a system and show how these can be addressed using context-aware, dynamic printing. Continuous sensing ensures quality prints by adjusting inking-rate to hand movement and material properties. Continuous sensing also enables the print to adapt to previously printed traces to support incremental and iterative sketching. Results show good conductivity on many materials and high spatial precision, supporting on-the-fly creation of functional interfaces.
DOI
PDF
Video
Page

KnitSkin: Machine-Knitted Scaled Skin for Locomotion (ACM CHI 2022)
We present KnitSkin, a bio-inspired sleeve that can traverse diverse cylindrical terrains, ranging from a user’s forearm at a wearable scale, to pipes and tree branches at an environmental scale. Fabricated with a machine knitted substrate, the sleeve configures a stepped array of knitted scales that exhibit anisotropic friction. Coupled with the extension of actuators enclosed in the sleeve, the scales enable effective directional locomotion on cylindrical surfaces with varying slopes, textures, and curvatures. KnitSkin’s substrates are characterized by scales whose geometries and materials can be fine-tuned and channels that can accommodate diverse actuators. We introduce the design elements of KnitSkin in which we characterize a series of substrate parameters and their resulting anisotropic behaviors. In evaluating the locomotion, we examine the variables associated with the surface and actuator characteristics. KnitSkin obtains diverse applications across different scales, including wearable interfaces, industrial pipe-monitoring, to agricultural robots.
DOI
PDF
Video
Page
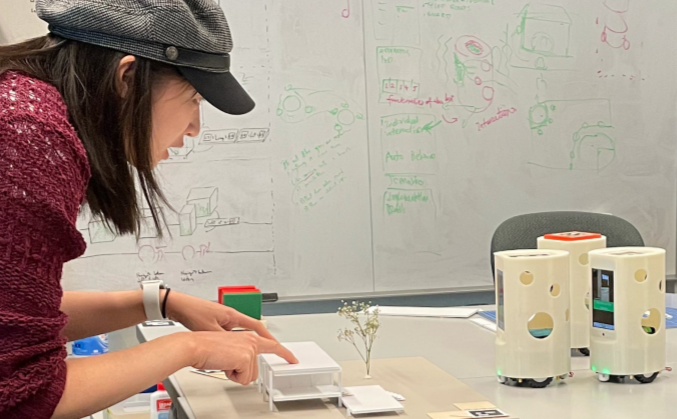
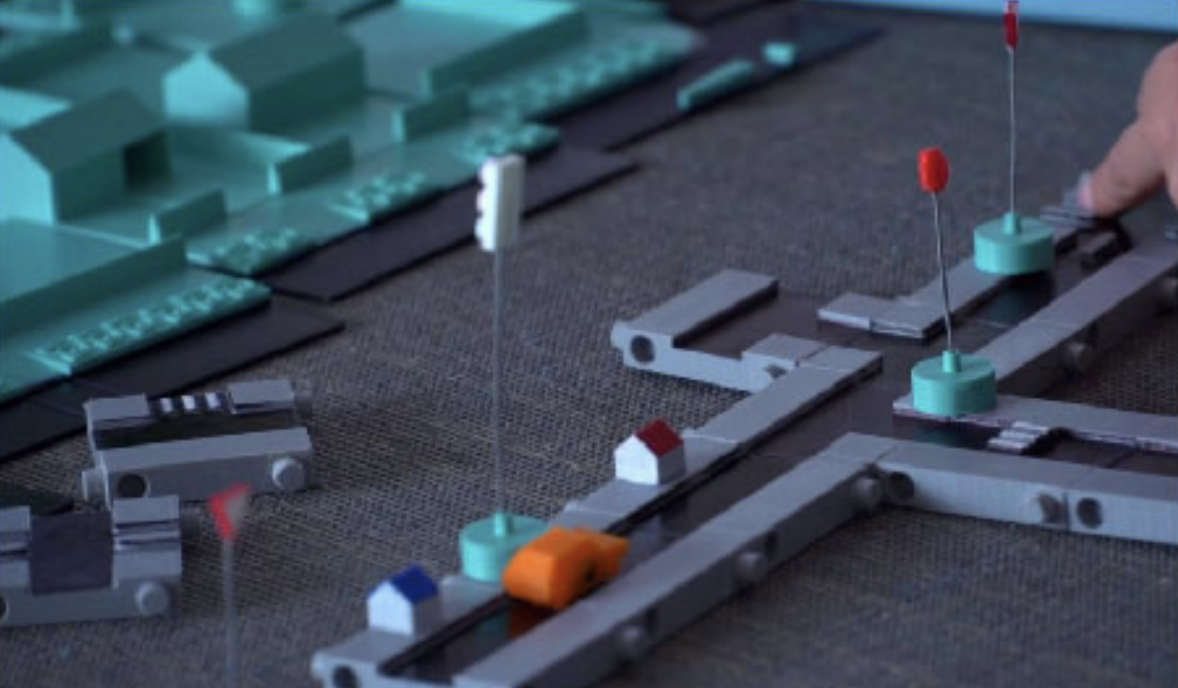
ASTEROIDS: Exploring Swarms of Mini-Telepresence Robots for Physical Skill Demonstration (ACM CHI 2022)
Online synchronous tutoring allows for immediate engagement between instructors and audiences over distance. However, tutoring physical skills remains challenging because current telepresence approaches may not allow for adequate spatial awareness, viewpoint control of the demonstration activities scattered across an entire work area, and the instructor’s sufficient awareness of the audience. We present Asteroids, a novel approach for tangible robotic telepresence, to enable workbench-scale physical embodiments of remote people and tangible interactions by the instructor. With Asteroids, the audience can actively control a swarm of mini-telepresence robots, change camera positions, and switch to other robots’ viewpoints. Demonstrators can perceive the audiences’ physical presence while using tangible manipulations to control the audience’s viewpoints and presentation flow. We conducted an exploratory evaluation for Asteroids with 12 remote participants in a model-making tutorial scenario with an architectural expert demonstrator. Results suggest our unique features benefitted participants’ engagement, sense of presence, and understanding.
DOI
PDF
Video

ElectriPop: Low-Cost, Shape-Changing Displays Using Electrostatically Inflated Mylar Sheets (ACM CHI 2022)
We describe how sheets of metalized mylar can be cut and then “inflated” into complex 3D forms with electrostatic charge for use in digitally-controlled, shape-changing displays. This is achieved by placing and nesting various cuts, slits and holes such that mylar elements repel from one another to reach an equilibrium state. Importantly, our technique is compatible with industrial and hobbyist cutting processes, from die and laser cutting to handheld exacto-knives and scissors. Given that mylar film costs <$1 per m2, we can create self-actuating 3D objects for just a few cents, opening new uses in low-cost consumer goods. We describe a design vocabulary, interactive simulation tool, fabrication guide, and proof-of-concept electrostatic actuation hardware. We detail our technique’s performance metrics along with qualitative feedback from a design study. We present numerous examples generated using our pipeline to illustrate the rich creative potential of our method.
DOI
PDF
Video
Page
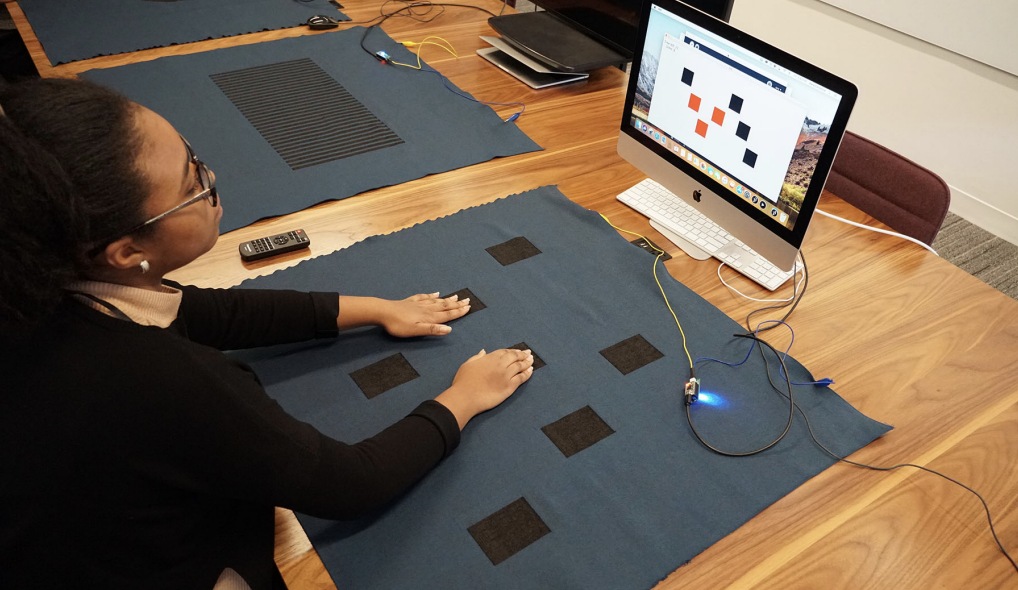
3D Printed Street Crossings: Supporting Orientation and Mobility Training with People who are Blind or have Low Vision (ACM CHI 2022)
The ability to cross the street at intersections is an essential skill, often taught to people who are blind or have low vision (BLV) with the aid of tactile maps and kits or toys. However, each of the existing mapping tools has shortcomings. We investigated whether co-designed 3D printed components can offer benefits. Guided by consultation with 11 Orientation and Mobility (O&M) professionals, we co-designed a series of 3D printed kits that they then used in their practice with BLV children who showed high levels of engagement and learning. The 3D materials were found to demonstrate the key concepts for street crossings in a portable, engaging and professional manner. They will be released for free download, enabling O&M professionals to access or modify the materials as required. We hope that use of our co-designed 3D printed tools will contribute to the safety, independence and inclusion of BLV people.
DOI
PDF
Video

O&O: A DIY toolkit for designing and rapid prototyping olfactory interfaces (ACM CHI 2022)
Constructing olfactory interfaces on demand requires significant design proficiency and engineering effort. The absence of powerful and convenient tools that reduced innovation complexity posed obstacles for future research in the area. To address this problem, we proposed O&O, a modular olfactory interface DIY toolkit. The toolkit consists of: (1) a scent generation kit, a set of electronics and accessories that supported three common scent vaporization techniques; (2) a module construction kit, a set of primitive cardboard modules for assembling permutable functional structures; (3) a design manual, a step-by-step design thinking framework that directs the decision-making and prototyping process. We organized a formal workshop with 19 participants and four solo DIY trials to evaluate the capability of the toolkit, the overall user engagement, the creations in both sessions, and the iterative suggestions. Finally, design implications and future opportunities were discussed for further research.
DOI
PDF
Video

Interactive Robotic Plastering: Augmented Interactive Design and Fabrication for On-site Robotic Plasteri (ACM CHI 2022)
This paper presents Interactive Robotic Plastering (IRoP), a system enabling designers and skilled workers to engage intuitively with an in-situ robotic plastering process. The research combines three elements: interactive design tools, an augmented reality interface, and a robotic spraying system. Plastering is a complex process relying on tacit knowledge and craftsmanship, making it difficult to simulate and automate. However, our system utilizes a controller-based interaction system to enable diverse users to interactively create articulated plasterwork in-situ. A customizable computational toolset converts human intentions into robotic motions while respecting robotic and material constraints. To accomplish this, we developed both an interactive computational model to translate the data from a motion-tracking system into robotic trajectories using design and editing tools as well as an audio-visual guidance system for in-situ projection. We then conducted two user-studies of designers and skilled workers who used IRoP to design and fabricate a full-scale demonstrator.
DOI
PDF
Video

First Steps Towards Designing Electrotactons: Investigating Intensity and Pulse Frequency as Parameters for Electrotactile Cues. (ACM CHI 2022)
Electrotactile stimulation is a novel form of haptic feedback. There is little work investigating its basic design parameters and how they create effective tactile cues. This paper describes two experiments that extend our knowledge of two key parameters. The first investigated the combination of pulse width and amplitude (Intensity) on sensations of urgency, annoyance, valence and arousal. Results showed significant effects: increasing Intensity caused higher ratings of urgency, annoyance and arousal but reduced valence. We established clear levels for differentiating each sensation. A second study then investigated Intensity and Pulse Frequency to find out how many distinguishable levels could be perceived. Results showed that both Intensity and Pulse Frequency significantly affected perception, with four distinguishable levels of Intensity and two of Pulse Frequency. These results add significant new knowledge about the parameter space of electrotactile cue design and help designers select suitable properties to use when creating electrotactile cues.
DOI
PDF
FabricatINK: Personal Fabrication of Bespoke Displays Using Electronic Ink from Upcycled E Readers (ACM CHI 2022)
Abstract: FabricatINK explores the personal fabrication of irregularly-shaped low-power displays using electronic ink (E ink). E ink is a programmable bicolour material used in traditional form-factors such as E readers. It has potential for more versatile use within the scope of personal fabrication of custom-shaped displays, and it has the promise to be the pre-eminent material choice for this purpose. We appraise technical literature to identify properties of E ink, suited to fabrication. We identify a key roadblock, universal access to E ink as a material, and we deliver a method to circumvent this by upcycling broken electronics. We subsequently present a novel fabrication method for irregularly-shaped E ink displays. We demonstrate our fabrication process and E ink’s versatility through ten prototypes showing different applications and use cases. By addressing E ink as a material for display fabrication, we uncover the potential for users to create custom-shaped truly bistable displays.
DOI
PDF
Video
2021

Adroid: Augmenting Hands-on Making with a Collaborative Robot (ACM UIST 2021)
Adroid1 enables users to borrow precision and accuracy from a robotic arm when using hand-held tools. When a tool is mounted to the robot, the user can hold and move the tool directly—Adroid measures the user’s applied forces and commands the robot to move in response. Depending on the tool and scenario, Adroid can selectively restrict certain motions. In the resulting interaction, the robot acts like a virtual “jig” which constrains the tool’s motion, augmenting the user’s accuracy, technique, and strength, while not diminishing their agency during open-ended fabrication tasks. We complement these hands-on interactions with projected augmented reality for visual feedback about the state of the system. We show how tools augmented by Adroid can support hands-on making and discuss how it can be configured to support other tasks within and beyond fabrication.
DOI
PDF
Video
Page
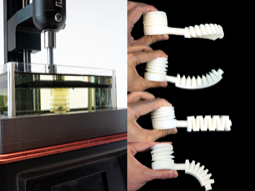
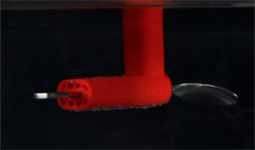
FabHydro: Printing Interactive Hydraulic Devices with an Affordable SLA 3D Printer (ACM UIST 2021)
We introduce FabHydro, a set of rapid and low-cost methods to prototype interactive hydraulic devices based on an off-the-shelf 3D printer and flexible photosensitive resin. We first present printer settings and custom support structures to warrant the successful print of flexible and deformable objects. We then demonstrate two printing methods to seal the transmission fluid inside these deformable structures: the Submerged Printing process that seals the liquid resin without manual assembly, and the Printing with Plugs method that allows the use of different transmission fluids without modification to the printer. Following the printing methods, we report a design space with a range of 3D printable primitives, including the hydraulic generator, transmitter, and actuator. To demonstrate the feasibility of our approaches and the breadth of new designs that they enable, we showcase a set of examples from a printed robotic gripper that can be operated at a distance to a mobile phone stand that serves as a status reminder by repositioning the user’s phone. We conclude with a discussion of our approach’s limitations and possible future improvements.
DOI
PDF
Video
Page

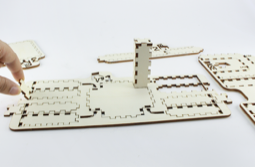
Daedalus in the Dark: Designing for Non-Visual Accessible Construction of Laser-Cut Architecture (ACM UIST 2021)
Design tools and research regarding laser-cut architectures have been widely explored in the past decade. However, such discussion has mostly revolved around technical and structural design questions instead of another essential element of laser-cut models — assembly — a process that relies heavily on components’ visual affordance, therefore less accessible to blind or low vision (BLV) people. To narrow the gap in this area, we co-designed with 7 BLV people to examine their assembly experience with different laser-cut architectures. From their feedback, we proposed several design heuristics and guidelines for Daedalus, a generative design tool that can produce tactile aids for laser-cut assembly given a few high-level manual inputs. We validate the proposed aids in a user study with 8 new BLV participants. Our results revealed that BLV users can manage laser-cut assembly more efficiently with Daedalus. Going forth from this design iteration, we discuss implications for future research on accessible laser-cut assembly.
DOI
PDF
Video

EIT-kit: An Electrical Impedance Tomography Toolkit for Health and Motion Sensing (ACM UIST 2021)
In this paper, we propose EIT-kit, an electrical impedance tomography toolkit for designing and fabricating health and motion sensing devices. EIT-kit contains (1) an extension to a 3D editor for personalizing the form factor of electrode arrays and electrode distribution, (2) a customized EIT sensing motherboard for performing the measurements, (3) a microcontroller library that automates signal calibration and facilitates data collection, and (4) an image reconstruction library for mobile devices for interpolating and visualizing the measured data. Together, these EIT-kit components allow for applications that require 2- or 4-terminal setups, up to 64 electrodes, and single or multiple (up to four) electrode arrays simultaneously. We motivate the design of each component of EIT-kit with a formative study, and conduct a technical evaluation of the data fidelity of our EIT measurements. We demonstrate the design space that EIT-kit enables by showing various applications in health as well as motion sensing and control.
DOI
PDF
Video
Page
PneuSeries: 3D Shape Forming with Modularized Serial-Connected Inflatables (ACM UIST 2021)
We present PneuSeries, a series of modularized inflatables where their inflation and deflation are propagated in-between stage by stage to form various shapes. The key component of PneuSeries is the bidirectional check valve that passively regulates the air flowing in/out from/to adjacent inflatables, allowing each of the inflatables to be inflated/deflated one by one through serial propagation. The form of the inflatable series thus is programmed by the sequential operations of a pump that push/pull the air in/out. In this paper, we explored the design of PneuSeries and implemented working prototypes as a proof of concept. In particular, we built PneuSeries with (1) modularized cubical, cuboidal, tetrahedral, prismatic, and custom inflatables to examine their shape forming, (2) fast assembly connectors to allow quick reconfiguration of the series, and (3) folding mechanism to reduce irregularity of the shrunken inflatables. We also evaluated the inflating and deflating time and the flow rate of the valve for simulating the inflating and deflating process and display the steps and time required to transform in our software. Finally, we demonstrate example objects that show the capability of PneuSeries and its potential applications.
DOI
PDF
Video
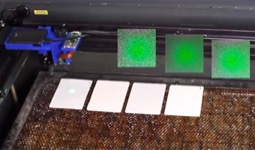
SensiCut: Material-Aware Laser Cutting Using Speckle Sensing and Deep Learning (ACM UIST 2021)
Laser cutter users face difficulties distinguishing between visually similar materials. This can lead to problems, such as using the wrong power/speed settings or accidentally cutting hazardous materials. To support users, we present SensiCut, an integrated material sensing platform for laser cutters. SensiCut enables material awareness beyond what users are able to see and reliably differentiates among similar-looking types. It achieves this by detecting materials’ surface structures using speckle sensing and deep learning. SensiCut consists of a compact hardware add-on for laser cutters and a user interface that integrates material sensing into the laser cutting workflow. In addition to improving the traditional workflow and its safety1, SensiCut enables new applications, such as automatically partitioning designs when engraving on multi-material objects or adjusting their geometry based on the kerf of the identified material. We evaluate SensiCut’s accuracy for different types of materials under different sheet orientations and illumination conditions.
DOI
PDF
Video
Page

autoAssembler: Automatic Reconstruction of Laser-Cut 3D Models (ACM UIST 2021)
Recent research showed how to import laser cut 3D models encoded in the form of 2D cutting plans into a 3D editor (assembler3), which allows users to perform parametric manipulations on such models. In contrast to assembler3 , which requires users to perform this process manually, we present autoAssembler, which performs this process automatically. AutoAssembler uses a beam search algorithm to search possible ways of assembling plates. It uses joints on these plates to combine them into assembly candidates. It thereby preferably pursues candidates (1) that have no intersecting plates, (2) that fit into a small bounding box, (3) that use plates whose joints fit together well, (4) that do not add many unpaired joints, (5) that make use of constraints posed by other plates, and (6) that conform to symmetry axes of the plates. This works for models that have at least one edge joint (finger or t-joint). In our technical evaluation, we imported 66 models using autoAssembler. AutoAssembler assembled 79% of those models fully automatically; another 18% of models required on average 2.7 clicks of post-processing, for an overall success rate of 97%.
DOI
PDF
Video
Page

Taxon: a Language for Formal Reasoning with Digital Fabrication Machines (ACM UIST 2021)
Digital fabrication machines for makers have expanded access to manufacturing processes such as 3D printing, laser cutting, and milling. While digital models encode the data necessary for a machine to manufacture an object, understanding the trade-offs and limitations of the machines themselves is crucial for successful production. Yet, this knowledge is not codified and must be gained through experience, which limits both adoption of and creative exploration with digital fabrication tools. To formally represent machines, we present Taxon, a language that encodes a machine’s high-level characteristics, physical composition, and performable actions. With this programmatic foundation, makers can develop rules of thumb that filter for appropriate machines for a given job and verify that actions are feasible and safe. We integrate the language with a browser-based system for simulating and experimenting with machine workflows. The system lets makers engage with rules of thumb and enrich their understanding of machines. We evaluate Taxon by representing several machines from both common practice and digital fabrication research. We find that while Taxon does not exhaustively describe all machines, it provides a starting point for makers and HCI researchers to develop tools for reasoning about and making decisions with machines.
DOI
PDF
Video
Page
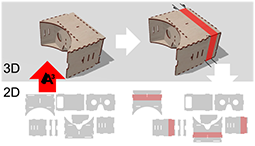
Roadkill: Nesting Laser-Cut Objects for Fast Assembly (ACM UIST 2021)
We present Roadkill, a software tool that converts 3D models to 2D cutting plans for laser cutting—such that the resulting layouts allow for fast assembly. Roadkill achieves this by putting all relevant information into the cutting plan: (1) Thumbnails indicate which area of the model a set of parts belongs to. (2) Parts with exposed finger joints are easy to access, thereby suggesting to start assembly here. (3) Openings in the sheet act as jigs, affording assembly within the sheet. (4) Users continue assembly by inserting what has already been assembled into parts that are immediately adjacent or are pointed to by arrows. Roadkill maximizes the number of joints rendered in immediate adjacency by breaking down models into “subassemblies.” Within a subassembly, Roadkill holds the parts together using break-away tabs. (5) Users complete subassemblies according to their labels 1, 2, 3…, following 1 -> 1 links to insert subassemblies into other subassemblies, until all parts come together. In our user study, Roadkill allowed participants to assemble layouts 2.4 times faster than layouts generated by a traditional pair-wise labeling of plates.
DOI
PDF
Video
Page

OmniFiber: Integrated Fluidic Fiber Actuators for Weaving Movement based Interactions into the ‘Fabric of Everyday Life’ (ACM UIST 2021)
Fiber – a primitive yet ubiquitous form of material – intertwines with our bodies and surroundings, from constructing our fibrous muscles that enable our movement, to forming fabrics that intimately interface with our skin. In soft robotics and advanced materials science research, actuated fibers are gaining interest as thin, flexible materials that can morph in response to external stimuli. In this paper, we build on fluidic artificial muscles research to develop OmniFiber - a soft, line-based material system for designing movement-based interactions. We devised actuated thin (øouter < 1.8 mm) fluidic fibers with integrated soft sensors that exhibit perceivably strong forces, up to 19 N at 0.5 MPa, and a high speed of linear actuation peaking at 150mm/s. These allow to flexibly weave them into everyday tangible interactions; including on-body haptic devices for embodied learning, synchronized tangible interfaces for remote communication, and robotic crafting for expressivity. The design of such interactive capabilities is supported by OmniFiber’s design space, accessible fabrication pipeline, and a fluidic I/O control system to bring omni-functional fluidic fibers to the HCI toolbox of interactive morphing materials.
DOI
PDF
Video
Page

Weaving Schematics and Code: Interactive Visual Editing for Hardware Description Languages (ACM UIST 2021)
In many engineering disciplines such as circuit board, chip, and mechanical design, a hardware description language (HDL) approach provides important benefits over direct manipulation interfaces by supporting concepts like abstraction and generator meta-programming. While several such HDLs have emerged recently and promised power and flexibility, they also present challenges – especially to designers familiar with current graphical workflows. In this work, we investigate an IDE approach to provide a graphical editor for a board-level circuit design HDL. Unlike GUI builders which convert an entire diagram to code, we instead propose generating equivalent HDL from individual graphical edit actions. By keeping code as the primary design input, we preserve the full power of the underlying HDL, while remaining useful even to advanced users. We discuss our concept, design considerations such as performance, system implementation, and report on the results of an exploratory remote user study with four experienced hardware designers.
DOI
PDF
Video
MetaSense: Integrating Sensing Capabilities into Mechanical Metamaterial (ACM UIST 2021)
In this paper, we present a method to integrate sensing capabilities into 3D printable metamaterial structures comprised of cells, which enables the creation of monolithic input devices for HCI. We accomplish this by converting select opposing cell walls within the metamaterial device into electrodes, thereby creating capacitive sensors. When a user interacts with the object and applies a force, the distance and overlapping area between opposing cell walls change, resulting in a measurable capacitance variation.
To help designers create interactive metamaterial devices, we contribute a design and fabrication pipeline based on multi-material 3D printing. Our 3D editor automatically places conductive cells in locations that are most affected by deformation during interaction and thus are most suitable as sensors. On export, our editor creates two files, one for conductive and one for non-conductive cell walls, which designers can fabricate on a multi-material 3D printer. Our applications show that designers can create metamaterial devices that sense various interactions, including sensing acceleration, binary state, shear, and magnitude and direction of applied force.
DOI
PDF
Video
Page

Trusscillator: a System for Fabricating Human-Scale Human-Powered Oscillating Devices
Trusscillator is an end-to-end system that allows non-engineers to create human-scale human-powered devices that perform oscillatory movements, such as playground equipment, workout devices, and interactive kinetic installations. While recent research has been focusing on generating mechanisms that produce specific movement-path, without considering the required energy for the motion (kinematic approach), Trusscillator supports users in designing mechanisms that recycle energy in the system in the form of oscillating mechanisms (dynamic approach), specifically with the help of coil-springs. The presented system features a novel set of tools tailored for designing the dynamic experience of the motion. These tools allow designers to focus on user experience-specific aspects, such as motion range, tempo, and effort while abstracting away the underlying technicalities of eigenfrequencies, spring constants, and energy. Since the forces involved in the resulting devices can be high, Trusscillator helps users to fabricate from steel by picking out appropriate steal springs, generating part lists, and producing stencils and welding jigs that help weld with precision. To validate our system, we designed, built, and tested a series of unique playground equipment featuring 2-4 degrees of movement.
DOI
PDF
Video
Page

Lenticular Objects: 3D Printed Objects with Lenticular Lens Surfaces That Can Change their Appearance Depending on the Viewpoint
In this paper, we present a method that makes 3D objects appear differently under different viewpoints. We accomplish this by 3D printing lenticular lenses across the curved surface of objects. By calculating the lens distribution and the corresponding surface color patterns, we can determine which appearance is shown to the user at each viewpoint. We built a 3D editor that takes as input the 3D model, and the visual appearances, i.e. images, to show at different viewpoints. Our 3D editor then calculates the corresponding lens placements and underlying color pattern. On export, the user can use ray tracing to live preview the resulting appearance from each angle. The 3D model, color pattern, and lenses are then 3D printed in one pass on a multi-material 3D printer to create the final 3D object. To determine the best fabrication parameters for 3D printing lenses, we printed lenses of different sizes and tested various post-processing techniques. To support a large number of different appearances, we compute the lens geometry that has the best trade-off between the number of viewpoints and the protrusion from the object geometry. Finally, we demonstrate our system in practice with a range of use cases for which we show the simulated and physical results side by side.
DOI
PDF
Video
Page

MARS: Nano-Power Battery-free Wireless Interfaces for Touch, Swipe and Speech Input
Augmenting everyday surfaces with interaction sensing capability that is maintenance-free, low-cost (∼ $1), and in an appropriate form factor is a challenge with current technologies. MARS (Multi-channel Ambiently-powered Realtime Sensing) enables battery-free sensing and wireless communication of touch, swipe, and speech interactions by combining a nanowatt programmable oscillator with frequency-shifted analog backscatter communication. A zero-threshold voltage field-effect transistor (FET) is used to create an oscillator with a low startup voltage (∼ 500 mV) and current (< 2uA), whose frequency can be affected through changes in inductance or capacitance from the user interactions. Multiple MARS systems can operate in the same environment by tuning each oscillator circuit to a different frequency range. The nanowatt power budget allows the system to be powered directly through ambient energy sources like photodiodes or thermoelectric generators. We differentiate MARS from previous systems based on power requirements, cost, and part count and explore different interaction and activity sensing scenarios suitable for indoor environments.
DOI
PDF
Video
Page

PocketView: Through-Fabric Information Displays
People often have to remove their phone from an inaccessible location like a pocket to view things like notifications and directions. We explore the idea of viewing such information through the fabric of a pocket using low resolution bright LED matrix displays. A survey confirms viewing information on inaccessible phones is desirable, and establishes types of pockets in garments worn by respondents and what objects are typically put in pockets. A technical evaluation validates that LED light can shine through many common garment fabrics. Based on these results, functional hardware prototypes are constructed to demonstrate different form factors of through-fabric display devices, such as a phone, wallet, a key fob, a pen, and earbud headphone case. A simple interaction vocabulary for viewing key information on these devices is described, and the social and technical aspects of the approach are discussed.
DOI
PDF
Video
Page

BodyStylus: Freehand On-Body Design and Fabrication of Epidermal Interfaces (ACM CHI 2021)
In traditional body-art, designs are adjusted to the body as they are applied, enabling creative improvisation and exploration. Conventional design and fabrication methods of epidermal interfaces, however, separate these steps. With BodyStylus we present the first computer-assisted approach for on-body design and fabrication of epidermal interfaces. Inspired by traditional techniques, we propose a hand-held tool that augments freehand inking with digital support: projected in-situ guidance assists creating valid on-body circuits and aesthetic ornaments that align with the human bodyscape, while pro-active switching between inking and non-inking creates error preventing constraints. We contribute BodyStylus’s design rationale and interaction concept along with an interactive prototype that uses self-sintering conductive ink. Results of two focus group explorations showed that guidance was more appreciated by artists, while constraints appeared more useful to engineers, and that working on the body inspired critical reflection on the relationship between bodyscape, interaction, and designs.
DOI
PDF
Video
Page

CapContact: Reconstructing High-Resolution Contact Areas on Capacitive Sensors (ACM CHI 2021)
Touch input is dominantly detected using mutual-capacitance sensing, which measures the proximity of close-by objects that change the electric field between the sensor lines. The exponential drop-off in intensities with growing distance enables software to detect touch events, but does not reveal true contact areas. In this paper, we introduce CapContact, a novel method to precisely infer the contact area between the user’s finger and the surface from a single capacitive image. At 8 × super-resolution, our convolutional neural network generates refined touch masks from 16-bit capacitive images as input, which can even discriminate adjacent touches that are not distinguishable with existing methods. We trained and evaluated our method using supervised learning on data from 10 participants who performed touch gestures. Our capture apparatus integrates optical touch sensing to obtain ground-truth contact through high-resolution frustrated total internal reflection. We compare our method with a baseline using bicubic upsampling as well as the ground truth from FTIR images. We separately evaluate our method’s performance in discriminating adjacent touches. CapContact successfully separated closely adjacent touch contacts in 494 of 570 cases (87%) compared to the baseline’s 43 of 570 cases (8%). Importantly, we demonstrate that our method accurately performs even at half of the sensing resolution at twice the grid-line pitch across the same surface area, challenging the current industry-wide standard of a ∼ 4 mm sensing pitch. We conclude this paper with implications for capacitive touch sensing in general and for touch-input accuracy in particular.
DOI
PDF
Video
Page

MagnetIO: Passive yet Interactive Soft Haptic Patches Anywhere (ACM CHI 2021)
We propose a new type of haptic actuator, which we call MagnetIO, that is comprised of two parts: one battery-powered voice-coil worn on the user's fingernail and any number of interactive soft patches that can be attached onto any surface (everyday objects, user's body, appliances, etc.). When the user's finger wearing our voice-coil contacts any of the interactive patches it detects its magnetic signature via magnetometer and vibrates the patch, adding haptic feedback to otherwise input-only interactions. To allow these passive patches to vibrate, we make them from silicone with regions doped with polarized neodymium powder, resulting in soft and stretchable magnets. This stretchable form-factor allows them to be wrapped to the user's body or everyday objects of various shapes. We demonstrate how these add haptic output to many situations, such as adding haptic buttons to the walls of one's home. In our technical evaluation, we demonstrate that our interactive patches can be excited across a wide range of frequencies (0-500 Hz) and can be tuned to resonate at specific frequencies based on the patch's geometry. Furthermore, we demonstrate that MagnetIO's vibration intensity is as powerful as a typical linear resonant actuator (LRA); yet, unlike these rigid actuators, our passive patches operate as springs with multiple modes of vibration, which enables a wider band around its resonant frequency than an equivalent LRA.
DOI
PDF
Video

Documented: Embedding Information onto and Retrieving Information from 3D Printed Objects (ACM CHI 2021)
Documentation for DIY tasks serve as codified project knowledge and help makers reach new understandings and appreciations for the artifact. Engaging in reflective processes using the documentation can be challenging when it comes to physical objects as the documentation and the artifact exist separately. We hypothesize that spatially associating the documentation information with the artifact can provide richer contextualization to reflect upon the artifact and design process. We implemented and evaluated Documented, a web application that helps makers associate documentation to 3D printed objects. Information can be embedded using printed tags spatially placed on the model and accessed using mobile AR. Our study highlights the different strategies participants had for organizing, embedding, and retrieving information. Informed by our results, we discuss how the coupling of the documentation and the artifact can support reflection and identify potential barriers that need further investigation.
DOI
PDF
Video
Page

Flower Jelly Printer: Slit Injection Printing for Parametrically Designed Flower Jelly (ACM CHI 2021)
Flower jellies, a delicate dessert in which a flower-shaped jelly floats inside another clear jelly, fascinate people with both their beauty and elaborate construction. In efforts to simplify the challenging fabrication and enrich the design space of this dessert, we present Flower Jelly Printer: a printing device and design software for digitally fabricating flower jellies. Our design software lets users play with parameters and preview the resulting forms until achieving their desired shapes. We also developed slit injection printing that directly injects colored jelly into a base jelly, and shared several design examples to show the breadth of design possibilities. Finally, the user study with novice and experienced users demonstrates that our system benefits creators of all experience levels by iterative design and precise fabrication. We hope to enable more people to design and create their own flower jellies while expanding access and the design space for digitally fabricated foods.
DOI
PDF
Video

Medical Maker Response to COVID-19: Distributed Manufacturing Infrastructure for Stop Gap Protective Equipment (ACM CHI 2021)
Unprecedented maker efforts arose in response to COVID-19 medical supply gaps worldwide. Makers in the U.S., participated in peer-production activities to manufacture personal protective equipment (PPE). Whereas, medical makers, who innovate exclusively for points of care, pivoted towards safer, reliable PPE. What were their efforts to pivot medical maker infrastructure towards reliable production of safe equipment at higher volumes? We interviewed 13 medical makers as links between institutions, maker communities, and wider regional industry networks. These medical makers organized stopgap manufacturing in institutional spaces to resolve acute shortages (March–May) and chronic shortages (May–July). They act as intermediaries in efforts to prototype and produce devices under regulatory, material, and human constraints of a pandemic. We re-frame their making efforts as repair work to offer an alternate critical view of optimism around making for crisis. We contribute an understanding of these efforts to inform infrastructure design for making with purpose and safety leading to opportunities for community production of safe devices at scale.
DOI
PDF
Video

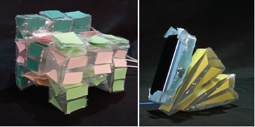
Unmaking: Enabling and Celebrating the Creative Material of Failure, Destruction, Decay, and Deformation (ACM CHI 2021)
The access and growing ubiquity of digital fabrication has ushered in a celebration of creativity and “making.” However, the focus is often on the resulting static artifact or the creative process and tools to design it. We envision a post-making process that extends past these final static objects — not just in their making but in their “unmaking.” By drawing from artistic movements such as Auto-Destructive Art, intentionally inverting well-established engineering principles of structurally sound designs, and safely misusing unstable materials, we demonstrate an important extension to making — unmaking. In this paper, we provide designers with a new vocabulary of unmaking operations within standard 3D modeling tools. We demonstrate how such designs can be realized using a novel multi-material 3D printing process. Finally, we detail how unmaking allows designs to change over time, is an ally to sustainability and re-usability, and captures themes of “aura,” emotionality, and personalization.
DOI
PDF
Video
Page
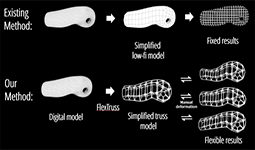
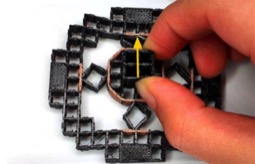
FlexTruss: A Computational Threading Method for Multi-material, Multi-form and Multi-use Prototyping (ACM CHI 2021)
3D printing, as a rapid prototyping technique, usually fabricates objects that are difficult to modify physically. This paper presents FlexTruss, a design and construction pipeline based on the assembly of modularized truss-shaped objects fabricated with conventional 3D printers and assembled by threading. To create an end-to-end system, a parametric design tool with an optimal Euler path calculation method is developed, which can support both inverse and forward design workflow and multi-material construction of modular parts. In addition, the assembly of truss modules by threading is evaluated with a series of application cases to demonstrate the affordance of FlexTruss. We believe that FlexTruss extends the design space of 3D printing beyond typically hard and fixed forms, and it will provide new capabilities for designers and researchers to explore the use of such flexible truss structures in human-object interaction.
DOI
PDF
Video
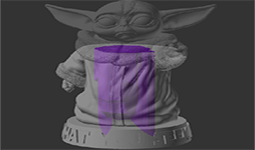
ShrinCage: 4D Printing Accessories that Self-Adapt (ACM CHI 2021)
3D printing technology makes Do-It-Yourself and reforming everyday objects a reality. However, designing and fabricating attachments that can seamlessly adapt existing objects to extended functionality is a laborious process, which requires accurate measuring, modeling, manufacturing, and assembly. This paper presents ShrinCage, a 4D printing system that allows novices to easily create shrinkable adaptations to fit and fasten existing objects. Specifically, the design tool presented in this work aid in the design of attachment that adapts to irregular morphologies, which accommodates the variations in measurements and fabrication, subsequently simplifying the modeling and assembly processes. We further conduct mechanical tests and user studies to evaluate the availability and feasibility of this method. Numerous application examples created by ShrinCage prove that it can be adopted by aesthetic modification, assistive technology, repair, upcycling, and augmented 3D printing.
DOI
PDF
Video

Exquisite Fabrication: Exploring Turn-taking between Designers and Digital Fabrication Machines (ACM CHI 2021)
Digital fabrication and craftsmanship is entering into a new phase with increasing levels of complexity and a renewed desire for composites and cross-material experimentation. However, allowing work to travel from machine to machine, remains a challenge in terms of workflow, communication, orientation and material. Based on an exploration to combine embroidery and 3D printing in the pursuit of inflatable solutions, we propose the metaphor of the drawing game Exquisite Corpse to outline the three emerging concerns: turn taking, orientation and trade-offs. We propose a set of guidelines that suggest ways in which, we may allow different digital fabrication machines to be used in sequence, as a method for adding complexity to the things we make and the ways our machines may talk to one another.
DOI
PDF
Video

LaserFactory: A Laser Cutter-based Electromechanical Assembly and Fabrication Platform to Make Functional Devices & Robots (ACM CHI 2021)
LaserFactory is an integrated fabrication process that augments a commercially available fabrication machine to support the manufacture of fully functioning devices without human intervention. In addition to creating 2D and 3D mechanical structures, LaserFactory creates conductive circuit traces with arbitrary geometries, picks-and-places electronic and electromechanical components, and solders them in place. To enable this functionality, we make four contributions. First, we build a hardware add-on to the laser cutter head that can deposit silver circuit traces and assemble components. Second, we develop a new method to cure dispensed silver using a CO2 laser. Third, we build a motion-based signaling method that allows our system to be readily integrated with commercial laser cutters. Finally, we provide a design and visualization tool for making functional devices with LaserFactory. Having described the LaserFactory system, we demonstrate how it is used to fabricate devices such as a fully functioning quadcopter and a sensor-equipped wristband. Our evaluation shows that LaserFactory can assemble a variety of differently sized components (up to 65g), that these can be connected by narrow traces (down to 0.75mm) that become highly conductive after laser soldering (3.2Ω/m), and that our acceleration-based sensing scheme works reliably (to 99.5% accuracy).
DOI
PDF
Video
Page
Fabricaide: Fabrication-Aware Design for 2D Cutting Machines (ACM CHI 2021)
Designers of machine-cut objects must often consider whether and how their design can be fabricated with their available materials. In contrast to tools that support preparing finished designs for fabrication, we investigate shortening the feedback loop between design creation and fabrication preparation. To this end, we present Fabricaide, a fabrication-aware tool that interleaves the processes of creating and preparing designs for fabrication. By providing live feedback on how parts should be placed onto material sheets, analyzing how much material is consumed, and alerting users when designs are infeasible, Fabricaide enables users to proactively tailor their design to their available material. Fabricaide achieves this with a custom packing algorithm that arranges parts onto material sheets at interactive speeds. Our qualitative user study shows how Fabricaide can support different workflows, encourage material-conscious design practices, and provide insights on how to further improve similar interfaces in the future.
DOI
PDF
Video
Page
Scrappy: Using Scrap Material as Infill to Make Fabrication More Sustainable (ACM CHI 2021)
We present a software system for fused deposition modelling 3D printing that replaces infill material with scrap to reduce material and energy consumption. Example scrap objects include unused 3D prints from prototyping and calibration, household waste like coffee cups, and off-cuts from other fabrication projects. To achieve this, our system integrates into an existing CAD workflow and manages a database of common items, previous prints, and manually entered objects. While modelling in a standard CAD application, the system suggests objects to insert, ranked by how much infill material they could replace. This computation extends an existing nesting algorithm to determine which objects fit, optimize their alignment, and adjust the enclosing mesh geometry. While printing, the system uses custom tool-paths and animated instructions to enable anyone nearby to manually insert the scrap material.
DOI
PDF
Video
Page

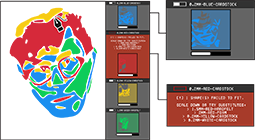
ChromoUpdate: Fast Design Iteration of Photochromic Color Textures Using Grayscale Previews and Local Color Updates (ACM CHI 2021)
ChromoUpdate is a texture transfer system for fast design iteration. For the early stages of design, ChromoUpdate provides a fast grayscale preview that enables a texture to be transferred in under one minute. Once designers are satisfied with the grayscale texture, ChromoUpdate supports designers in coloring the texture by transitioning individual pixels directly to a desired target color. Finally, if designers need to make a change to the color texture already transferred, ChromoUpdate can quickly transition individual pixels from one color to a new target color. ChromoUpdate accomplishes this by (1) using a UV projector rather than a UV LED, which enables pixels to be saturated individually rather than resetting the entire texture to black, and (2) providing two new texture transfer algorithms that allow for fast grayscale previews and color-to-color transitions. Our evaluation shows a significant increase in texture transfer speed for both the grayscale preview (89%) and color-to-color updates (11%).
DOI
PDF
Video
Page
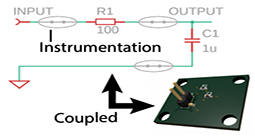
Coupling Simulation and Hardware for Interactive Circuit Debugging (ACM CHI 2021)
Simulation offers many advantages when designing analog circuits. Designers can explore alternatives quickly, without added cost or risk of hardware faults. However, it is challenging to use simulation as an aid during interactive debugging of physical circuits, due to difficulties in comparing simulated analyses with hardware measurements. Designers must continually configure simulations to match the state of the physical circuit (e.g. capturing sensor inputs), and must manually rework the hardware to replicate changes or analyses performed in simulation. We propose techniques leveraging instrumentation and programmable test hardware to create a tight coupling between a physical circuit and its simulated model. Bridging these representations helps designers to compare simulated and measured behaviors, and to quickly perform analytical techniques on hardware (e.g. parameter-response analysis) that are typically cumbersome outside of simulation. We implement these techniques in a prototype and show how it aids in efficiently debugging a variety of analog circuits.
DOI
PDF
Video
Page

KnitUI: Fabricating Textile Sensor and User Interface with Machine Knitting (ACM CHI 2021)
With the recent interest in wearable electronics and smart garments, digital fabrication of sensing and interactive textiles is in increasing demand. Recently, advances in digital machine knitting offer opportunities for the programmable, rapid fabrication of soft, breathable textiles. In this paper, we present KnitUI, a novel, accessible machine-knitted user interface based on resistive pressure sensing. Employing conductive yarns and various machine knitting techniques, we computationally design and automatically fabricate the double-layered resistive sensing structures as well as the coupled conductive connection traces with minimal manual post-processing. We present an interactive design interface for users to customize KnitUI’s colors, sizes, positions, and shapes. After investigating design parameters for the optimized sensing and interactive performance, we demonstrate KnitUI as a portable, deformable, washable, and customizable interactive and sensing platform. It obtains diverse applications, including wearable user interfaces, tactile sensing wearables, and artificial robot skin.
DOI
PDF
Video
Page

Thermoformed Circuit Boards: Fabrication of highly conductive freeform 3D printed circuit boards with heat bending (ACM CHI 2021)
Fabricating 3D printed electronics using desktop printers has become more accessible with recent developments in conductive thermoplastic filaments. Because of their high resistance and difficulties in printing traces in vertical directions, most applications are restricted to capacitive sensing. In this paper, we introduce Thermoformed Circuit Board (TCB), a novel approach that employs the thermoformability of the 3D printed plastics to construct various double-sided, rigid and highly conductive freeform circuit boards that can withstand high current applications through copper electroplating. To illustrate the capability of the TCB, we showcase a range of examples with various shapes, electrical characteristics and interaction mechanisms. We also demonstrate a new design tool extension to an existing CAD environment that allows users to parametrically draw the substrate and conductive trace, and export 3D printable files. TCB is an inexpensive and highly accessible fabrication technique intended to broaden HCI researcher participation.
DOI
PDF
Video
Page

AccessibleCircuits: Adaptive Add-On Circuit Components for People with Blindness or Low Vision (ACM CHI 2021)
In this paper, we propose the designs for low cost and 3D-printable add-on components to adapt existing breadboards, circuit components and electronics tools for blind or low vision (BLV) users. Through an initial user study, we identified several barriers to entry for beginners with BLV in electronics and circuit prototyping. These barriers guided the design and development of our add-on components. We focused on developing adaptations that provide additional information about the specific component pins and breadboard holes, modify tools to make them easier to use for users with BLV, and expand non-visual feedback (e.g., audio, tactile) for tasks that require vision. Through a second user study, we demonstrated that our adaptations can effectively overcome the accessibility barriers in breadboard circuit prototyping for users with BLV.
DOI
PDF
Video
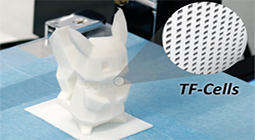
Designing Metamaterial Cells to Enrich Thermoforming 3D Printed Object for Post-Print Modification (ACM CHI 2021)
In this paper, we present a metamaterial structure called thermoformable cells, TF-Cells, to enrich thermoforming for post-print modification. So far, thermoforming is limitedly applied for modifying a 3D printed object due to its low thermal conductivity. TF-Cells consists of beam arrays that affluently pass hot air and have high heat transference. Through heating the embedded TF-Cells of the printed object, users can modify not only the deeper area of the object surface but also its form factor. With a series of technical experiments, we investigated TF-Cells’ thermoformability, depending on their structure’s parameters, orientations, and heating conditions. Next, we present a series of compound cells consisting of TF-Cells and solid structure to adjust stiffness or reduce undesirable shape deformation. Adapting the results from the experiments, we built a simple tool for embedding TF-Cells into a 3D model. Using the tool, we implemented examples under contexts of mechanical fitting, ergonomic fitting, and aesthetic tuning.
DOI
PDF
Video
Assembler3: 3D Reconstruction of Laser-Cut Models (ACM CHI 2021)
We present Assembler3 a software tool that allows users to perform 3D parametric manipulations on 2D laser cutting plans. Assembler3 achieves this by semi-automatically converting 2D laser cutting plans to 3D, where users modify their models using available 3D tools (kyub), before converting them back to 2D. In our user study, this workflow allowed users to modify models 10x faster than using the traditional approach of editing 2D cutting plans directly. Assembler3 converts models to 3D in 5 steps: (1) plate detection, (2) joint detection, (3) material thickness detection, (4) joint matching based on hashed joint "signatures", and (5) interactive reconstruction. In our technical evaluation, Assembler3 was able to reconstruct 100 of 105 models. Once 3D-reconstructed, we expect users to store and share their models in 3D, which can simplify collaboration and thereby empower the laser cutting community to create models of higher complexity.
DOI
PDF
Video
Page
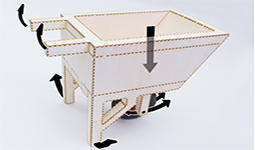
FastForce: Real-Time Reinforcement of Laser-Cut Structures (ACM CHI 2021)
We present fastForce, a software tool that detects structural flaws in laser cut 3D models and fixes them by introducing additional plates into the model, thereby making models up to 52x stronger. By focusing on a specific type of structural issue, i.e., poorly connected sub-structures in closed box structures, fastForce achieves real-time performance (106x faster than finite element analysis, in the specific case of the wheelbarrow from Figure 1). This allows fastForce to fix structural issues continuously in the background, while users stay focused on editing their models and without ever becoming aware of any structural issues. In our study, six of seven participants inadvertently introduced severe structural flaws into the guitar stands they designed. Similarly, we found 286 of 402 relevant models in the kyub [1] model library to contain such flaws. We integrated fastForce into a 3D editor for lasercutting (kyub) and found that even with high plate counts fastForce achieves real-time performance.
DOI
PDF
Video

Developable Metamaterials: Mass-fabricable Metamaterials by Laser-Cutting Elastic Structures (ACM CHI 2021)
We propose a novel design of engineered, structured materials that leverages fast fabrication technologies, pushing them towards mass-fabrication. Specifically, our metamaterial is designed to be laser cut, to approximate the volumetric shape and allow for locally varying compliance. Traditional mechanical metamaterials consist of intricate cells arranged on a 3-dimensional grid, limiting them to 3D printing—which is slow. Our metamaterial is designed for laser cutting, which is drastically faster. Our structures are best described as ruffled strips of thin sheet material, such as paper, plastics, metals, etc. Users can interactively define the ruffles’ anisotropic stiffness directions and local density. Our computational design tool assists users by automatically optimizing the ruffle to fill the shape’s volume, and exporting the flat ruffle design ready for cutting. We demonstrate how such ruffled metamaterials can be utilized for, e.g., custom toys with locally varying compliance, custom packaging material, or lightweight formwork for architectural shells.
DOI
PDF
Video
Page

TapeBlocks: A Making Toolkit for People Living with Intellectual Disabilities (ACM CHI 2021)
The accessibility and affordability of tangible electronic toolkits are significant barriers to their uptake by people with disabilities. We present the design and evaluation of TapeBlocks, a low-cost, low-fidelity toolkit intended to be accessible for people with intellectual disabilities while promoting creativity and engagement. We evaluated TapeBlocks by interviewing makers, special educational needs teachers and support coaches. Analysis of these interviews informed the design of a series of maker workshops using TapeBlocks with young adults living with intellectual disabilities, led by support coaches with support from the research team. Participants were able to engage with TapeBlocks and making, eventually building their own TapeBlocks to make personal creations. Our evaluation reveals how TapeBlocks supports accessible making and playful discovery of electronics for people living with disabilities, and addresses a gap in existing toolkits by being tinkerable, affordable and having a low threshold for engagement.
DOI
PDF
Video
Page

"Beyond 3D printers”: Understanding Long-Term Digital Fabrication Practices for the Education of Visually Impaired or Blind Youth (ACM CHI 2021)
Disability professionals could use digital fabrication tools to provide customised assistive technologies or accessible media beneficial to the education of Blind or visually impaired youth. However, there is little documentation of long-term practices with these tools by professionals in this field, limiting our ability to support their work. We report on such practices in a French organisation, providing disability educational services and using digital fabrication since 2013, for six years. We trace how professionals defined how digital fabrication could and should be used through a range of projects, based on pedagogical uses and the constraints in creation, production and maintenance. We outline new research perspectives going beyond 3D printers and its promises of automation to embrace hybrid approaches currently supported by laser cutters, the learning and documentation process, and the production of accessible tactile media at a regional or national scale.
DOI
PDF
Video

Enabling Personal Computational Handweaving with a Low-Cost Jacquard Loom (ACM CHI 2021)
We present an inexpensive tabletop loom that offers fully computational patterning while maintaining the flexibility of handweaving. Our loom can be assembled for under US$200 with 3D printed parts, and it can be controlled straightforwardly over USB. Our loom is explicitly a hand loom: that is, a weaver is required to operate the weaving process and may mediate row-by-row patterning and material specifics like yarn tension. Our approach combines the flexibility of fully analog handweaving with the computational affordances of digital fabrication: it enables the incorporation of special techniques and materials, as well as allowing for the possibility of computational and creative interventions in the weaving process itself. In taking this approach, we aim to serve a range of end users including artisans and researchers, whether for skill-building, for rapid prototyping, or for creative reflection. We describe the mechanical and electronic implementation of our loom and show examples of its use for personal fabrication.
DOI
PDF
Video
Page
Engineering Multifunctional Spacer Fabrics Through Machine Knitting (ACM CHI 2021)
Machine knitting is an increasingly accessible fabrication technology for producing custom soft goods. However, recent machine knitting research has focused on knit shaping, or on adapting hand-knitting patterns. We explore a capability unique to machine knitting: producing multilayer spacer fabrics. These fabrics consist of two face layers connected by a monofilament filler yarn which gives the structure stiffness and volume. We show how to vary knit patterning and yarn parameters in spacer fabrics to produce tactile materials with embedded functionality for forming soft actuated mechanisms and sensors with tunable density, stiffness, material bias, and bristle properties. These soft mechanisms can be rapidly produced on a computationally-controlled v-bed knitting machine and integrated directly into soft objects.
DOI
PDF
Video
Page

ClothTiles: A Prototyping Platform to Fabricate Customized Actuators on Clothing using 3D Printing and Shape-Memory Alloys (ACM CHI 2021)
Emerging research has demonstrated the viability of on-textile actuation mechanisms, however, an easily customizable and versatile on-cloth actuation mechanism is yet to be explored. In this paper, we present ClothTiles along with its rapid fabrication technique that enables actuation of clothes. ClothTiles leverage flexible 3D-printing and Shape-Memory Alloys (SMAs) alongside new parametric actuation designs. We validate the concept of fabric actuation using a base element, and then systematically explore methods of aggregating, scaling, and orienting prospects for extended actuation in garments. A user study demonstrated that our technique enables multiple actuation types applied across a variety of clothes. Users identified both aesthetic and functional applications of ClothTiles. We conclude with a number of insights for the Do-It-Yourself community on how to employ 3D-printing with SMAs to enable actuation on clothes.
DOI
PDF
Video
Page
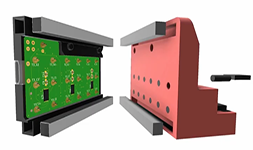
Oh, Snap! A Fabrication Pipeline to Magnetically Connect Conventional and 3D-Printed Electronics (ACM CHI 2021)
3D printing has revolutionized rapid prototyping by speeding up the creation of custom-shaped objects. With the rise of multi-material 3D printers, these custom-shaped objects can now be made interactive in a single pass through passive conductive structures. However, connecting conventional electronics to these conductive structures often still requires time-consuming manual assembly involving many wires, soldering or gluing. To alleviate these shortcomings, we propose : a fabrication pipeline and interfacing concept to magnetically connect a 3D-printed object equipped with passive sensing structures to conventional sensing electronics. To this end, utilizes ferromagnetic and conductive 3D-printed structures, printable in a single pass on standard printers. We further present a proof-of-concept capacitive sensing board that enables easy and robust magnetic assembly to quickly create interactive 3D-printed objects. We evaluate by assessing the robustness and quality of the connection and demonstrate its broad applicability by a series of example applications.
DOI
PDF
Video

Itsy-Bits: Fabrication and Recognition of 3D-Printed Tangibles with Small Footprints on Capacitive Touchscreens (ACM CHI 2021)
Tangibles on capacitive touchscreens are a promising approach to overcome the limited expressiveness of touch input. While research has suggested many approaches to detect tangibles, the corresponding tangibles are either costly or have a considerable minimal size. This makes them bulky and unattractive for many applications. At the same time, they obscure valuable display space for interaction. To address these shortcomings, we contribute Itsy-Bits: a fabrication pipeline for 3D printing and recognition of tangibles on capacitive touchscreens with a footprint as small as a fingertip. Each Itsy-Bit consists of an enclosing 3D object and a unique conductive 2D shape on its bottom. Using only raw data of commodity capacitive touchscreens, Itsy-Bits reliably identifies and locates a variety of shapes in different sizes and estimates their orientation. Through example applications and a technical evaluation, we demonstrate the feasibility and applicability of Itsy-Bits for tangibles with small footprints.
DOI
PDF
Video
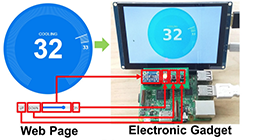
Appliancizer: Transforming Web Pages into Electronic Gadgets (ACM CHI 2021)
Making electronic gadgets that meet today's consumer standards has become a difficult task. Electronic gadgets are expected to have displays with visually appealing interfaces and, at the same time, be physically and screen-interactive, making the development process of these devices time-consuming and challenging. To address this problem, we have created Appliancizer, an online synthesis tool that can automatically generate sophisticated electronic devices from web pages. Appliancizer takes advantage of the similarities between software and physical interfaces to reduce development steps and allow the rapid development of electronic devices. By matching the interface of hardware components with the interface of graphical HTML elements found on web pages, our tool allows a designer to transform HTML elements from a digital to a tangible interface without changing the application source code. Finally, a modular design enables our tool to automatically combine the circuit design and low-level hardware code of selected hardware components into a complete design. Attendees can interact with our online tool and produce manufacturable PCBs from web pages.
DOI
PDF
Video
Page

Freeform Fabrication of Fluidic Edible Materials (ACM CHI 2021)
From providing nutrition to facilitating social exchanges, food plays an essential role in our daily lives and cultures. In HCI, we are interested in using food as an interaction medium and a context of personal fabrication. Yet, the design space of available food printing methods is limited to shapes with minimal overhangs and materials that have a paste-like consistency. In this work, we seek to expand this design space by adapting support bath-assisted printing to the food context. The bath scaffolds the embedded materials and preserves shapes during the printing processes, enabling us to create freeform food with fluid-like materials. We provide users guidelines for choosing the appropriate support bath type and processing methods depending on the printing material's properties. A design tool suite and application examples, including confectionery arts, 4D printed food, and edible displays are also offered to demonstrate the enabled interaction design space.
DOI
PDF
Video
Page

Making Sense of 3D Modelling and 3D Printing Activities of Young People: A Nexus Analytic Inquiry (ACM CHI 2021)
Physical space and materials we work with, as well as people we interact with affect the design and making processes. These aspects in relation to 3D designing in alignment with 3D printing need considerable exploration within Child-Computer interaction (CCI) research community. We conducted our case study by collecting 9-full-day-observation and interview data and examining 3D modeling and 3D printing activities, as work duties of 15-17-years-old summer trainees organized at the university. We identified, inspired by nexus analysis, different discourses circulating around these activities of novice young people and how the discourses are intermingled with the space, the materials, and the task at hand in complex ways, constructing and shaping the experience of the young participants. In our research and design implications, by signifying the impact of the people, challenges, tasks, spaces and tools, we provide recommendations for maintaining children's engagement in digital fabrication, significantly 3D designing and 3D printing, activities.
DOI
PDF
Video
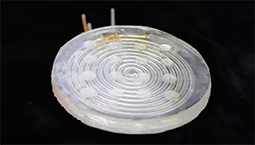
RElectrode: A Reconfigurable Electrode For Multi-Purpose Sensing Based on Microfluidics (ACM CHI 2021)
In this paper, we propose a reconfigurable electrode, RElectrode, using a microfluidic technique that can change the geometry and material properties of the electrode to satisfy the needs for sensing a variety of different types of user input through touch/touchless gestures, pressure, temperature, and distinguish between different types of objects or liquids. Unlike the existing approaches, which depend on the specific-shaped electrode for particular sensing (e.g., coil for inductive sensing), RElectrode enables capacity, inductance, resistance/pressure, temperature, pH sensings all in a single package. We demonstrate the design and fabrication of the microfluidic structure of our RElectrode, evaluate its sensing performance through several studies, and provide some unique applications. RElectrode demonstrates technical feasibility and application values of integrating physical and biochemical properties of microfluidics into novel sensing interfaces.
DOI
PDF
Video
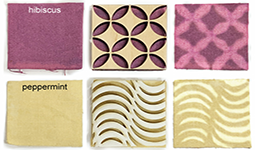
Self-deStaining Textiles: Designing Interactive Systems with Fabric, Stains and Light (ACM CHI 2021)
This work introduces “destaining” as an interactive component for the HCI community. While staining happens unintentionally (e.g., spilling coffee), destaining can be used as an intentional design tool that selectively degrades stains on textiles. We explore the design space using silver doped titanium dioxide (TiO2/Ag), stains and light as a set of design primitives for interactive systems. We then developed replicable and accessible fabrication and testing methods that enable HCI researchers and designers to upgrade various fabrics to self-destaining textiles. Next, we demonstrate a Self-deStaining textile interface with embedded Light Emitting Diodes (LEDs) and moisture sensors that activate cleaning. Lastly, we showcase how the textile can be used in everyday objects such as self-cleaning clothes, a patterning station for phone cases, and accessories that change patterns and colors based on the user’s experiences.
DOI
PDF
Video
Page
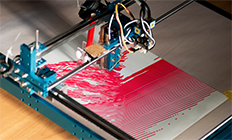
Tools, Tricks, and Hacks: Exploring Novel Digital Fabrication Workflows on #PlotterTwitter (ACM CHI 2021)
As digital fabrication machines become widespread, online communities have provided space for diverse practitioners to share their work, troubleshoot, and socialize. These communities pioneer increasingly novel fabrication workflows, and it is critical that we understand and conceptualize these workflows beyond traditional manufacturing models. To this end, we conduct a qualitative study of #PlotterTwitter, an online community developing custom hardware and software tools to create artwork with computer-controlled drawing machines known as plotters. We documented and analyzed emergent themes where the traditional interpretation of digital fabrication workflows fails to capture important nuances and nascent directions. We find that #PlotterTwitter makers champion creative exploration of interwoven digital and physical materials over a predictable series of steps. We discuss how this challenges long-running views of digital fabrication and propose design implications for future frameworks and toolkits to account for this breadth of practice.
DOI
PDF
Video
Page

VisiFit: Structuring Iterative Improvement for Novice Designers (ACM CHI 2021)
Visual blends are an advanced graphic design technique to seamlessly integrate two objects into one. Existing tools help novices create prototypes of blends, but it is unclear how they would improve them to be higher fidelity. To help novices, we aim to add structure to the iterative improvement process. We introduce a method for improving prototypes that uses secondary design dimensions to explore a structured design space. This method is grounded in the cognitive principles of human visual object recognition. We present VisiFit – a computational design system that uses this method to enable novice graphic designers to improve blends with computationally generated options they can select, adjust, and chain together. Our evaluation shows novices can substantially improve 76% of blends in under 4 minutes. We discuss how the method can be generalized to other blending problems, and how computational tools can support novices by enabling them to explore a structured design space quickly and efficiently.
DOI
PDF
Video

Therms-Up!: DIY Inflatables and Interactive Materials by Upcycling Wasted Thermoplastic Bags (ACM TEI 2021)
We introduce a DIY method of creating inflatables and prototyping interactive materials from wasted thermoplastic bags that easily found at home. We used a inexpensive FFF 3D printer, without any customization of the printer, to heat-seal and patterning different types of mono and multilayered thermoplastic bags. We characterized 8 different types of commonly-used product package’s plastic film which are mostly made of polypropylene and polyethylene, and provided 3D printer settings for re-purposing each material. In addition to heat-sealing, we explored a new design space of using a 3D printer to create embossing, origami creases, and textures on thermoplastic bags, and demonstrate examples of applying this technique to create various materials for rapid design and prototyping. To validate the durability of the inflatables, we evaluated 9 different thermoplastic air pouches’ heat-sealed bonding strength. Lastly, we show use-case scenarios of prototyping products and interface, and creating playful experience at home.
DOI
PDF
Page

Shape Changing Fabric Samples for Interactive Fashion Design (ACM TEI 2021)
As technology is integrated into all aspects of our lives, researchers are exploring emerging technologies in the field of fashion design. The substantial growth in the field of functional apparel design, such as the use of smart textiles, encourages researchers and fashion designers to incorporate technology within their designs. In much previous work, e-textiles have required interdisciplinary knowledge such as electrical engineering and computer science to be successful. To help with this we created ready-to-use shape changing fabric samples for fashion designers. We explored this research gap through a preliminary user case study with seven experienced designers. Our results suggest design approaches for shape changing fabric samples that would assist non-technically skilled designers incorporating technology in their designs.
DOI
PDF
Video
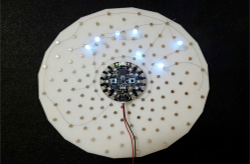
The ThreadBoard: Designing an E-Textile Rapid Prototyping Board (ACM TEI 2021)
E-textiles, which embed circuitry into textile fabrics, blend art and creative expression with engineering, making it a popular choice for STEAM classrooms [6, 12]. Currently, e-textile development relies on tools intended for traditional embedded systems, which utilize printed circuit boards and insulated wires. These tools do not translate well to e-textiles, which utilize fabric and uninsulated conductive thread. This mismatch of tools and materials can lead to an overly complicated development process for novices. In particular, rapid prototyping tools for traditional embedded systems are poorly matched for e-textile prototyping. This paper presents the ThreadBoard, a tool that supports rapid prototyping of e-textile circuits. With rapid prototyping, students can test circuit designs and identify circuitry errors prior to their sewn project. We present the design process used to iteratively create the ThreadBoard’s layout, with the goal of improving its usability for e-textile creators.
DOI
PDF
Video
Page

Punch-Sketching E-textiles: Exploring Punch Needle as a Technique for Sustainable, Accessible, and Iterative Physical Prototyping with E-textiles (ACM TEI 2021)
E-textiles, which embed circuitry into textile fabrics, blend art and creative expression with engineering, making it a popular choice for STEAM classrooms [6, 12]. Currently, e-textile development relies on tools intended for traditional embedded systems, which utilize printed circuit boards and insulated wires. These tools do not translate well to e-textiles, which utilize fabric and uninsulated conductive thread. This mismatch of tools and materials can lead to an overly complicated development process for novices. In particular, rapid prototyping tools for traditional embedded systems are poorly matched for e-textile prototyping. This paper presents the ThreadBoard, a tool that supports rapid prototyping of e-textile circuits. With rapid prototyping, students can test circuit designs and identify circuitry errors prior to their sewn project. We present the design process used to iteratively create the ThreadBoard’s layout, with the goal of improving its usability for e-textile creators.
DOI
PDF
Video
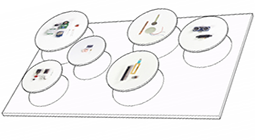
Smörgåsbords for Physical Computing (ACM TEI 2021)
Physical computing concerns the design of systems that can sense and respond to the world around them, which is why it is often used in interaction design projects in educational settings. However, students who encounter physical computing for the first time are typically not aware of the form factors and the potential for interaction of the various sensing and actuating possibilities. To complement existing touchpoints that these students have with physical computing, we present electronic smörgåsbords: boards that display collections of physical computing components that are available inhouse in an organised and interactive way to support the initiation of interaction design projects. The development of the boards allowed us to articulate four principles for their design, which are intended to inspire the development of future educational material.
DOI
PDF
Page
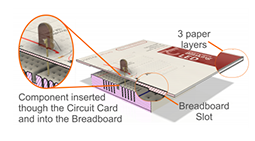
PPCards: Toward Enhancing Electronic Prototyping with Editions of a Card-based Platform (ACM TEI 2021)
Prototyping electronic circuits is often facilitated by web-based tutorials and breadboards. Several virtual and hybrid platforms do exist, each carrying their own limitations. Some of these platforms fall prey to split-attention effects, wherein users are required to split their attention to integrate multiple sources of spatially separated information. This hinders the learning and prototyping processes. Other platforms provide a single source of information, but lack tangible interaction with electronic components or suffer from the absence of active feedback which can also hinder these processes. There is hence a need for prototyping platforms that mitigate split attention effects, while continuing to provide other desirable aspects such as tangible interaction. To address this, we present three editions of PPCards, a card-based platform for prototyping electronic circuits, towards overcoming limitations of existing paradigms. Through a comparative study, it was determined that the first edition of PPCards outdid the conventional breadboard web-based tutorial paradigm in aspects of split attention, usability, and user experience. The second and third editions build upon successful characteristics of the first, additionally provisioning support for multimedia content and real-time feedback during the prototyping process. Based on quantitative data and qualitative feedback, we go on to discuss design considerations for future tangible card-based tools.
DOI
PDF
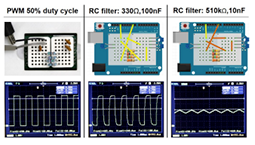
VirtualWire: Supporting Rapid Prototyping with Instant Reconfigurations of Wires in Breadboarded Circuits (ACM TEI 2021)
Assembling circuits is a challenging and time consuming activity for novice makers, frequently resulting in incorrect placements of wires and components into breadboards. This results in errors that are difficult to identify and debug, and delays that hinder creating, exploring or reconfiguring circuit layouts. This paper presents VirtualWire, a tool that allows users to rapidly design and modify circuits in software and have these changes instantiated in real-time as electrical connections on a physical breadboard. To achieve this, VirtualWire dynamically translates circuit design files into physical connections inside a hardware switching matrix, which handles wiring across breadboard rows and to/from an embedded Arduino. The user can interactively test, tune, and share different circuit layouts for an Arduino shield, and once satisfied, can fabricate the circuit on a permanent substrate. Quantitative and qualitative user studies demonstrate that VirtualWire significantly reduces the time taken for (by 37%), and the number of errors made during (by 53%) circuit assembly, while also supporting users in creating readable, space-efficient and flexible layouts.
DOI
PDF
Video
Page

Shaping Concrete for Interaction (ACM TEI 2021)
Concrete is a ubiquitous material in urban environments and increasingly used by industry and the maker movement. However, there is little research about its affordance and its potential for embedded User Interfaces (UI). In our ongoing work, we investigate different manufacturing processes and design strategies to change and adapt the affordances of concrete to make it appear interactive. We tested three interface elements, a button, a scroll wheel, and a slider, with 33 participants in a lab elicitation study. Each was created in two versions following two design strategies, one with a more natural look, the other more abstract. Five participants then bodystormed ideas with the prototypes in an outdoor environment. Based on our explorations, we discuss design considerations for creating concrete interfaces including the potential of both design strategies and present different application scenarios.
DOI
PDF
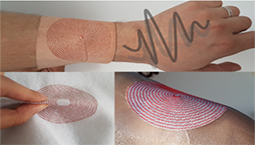
Soft Speakers: Digital Embroidering of DIY Customizable Fabric Actuators (ACM TEI 2021)
We introduce Soft Speakers, a systematic approach for designing custom fabric actuators that can be used as audio speakers and vibro-haptic actuators. Digitally-embroidered with e-textiles, we implement Soft Speakers as tactile, malleable and aesthetic designs to be part of wearables, soft furnishing and fabric objects. We present a rapid technique for the DIY fabrication of audio feedback into soft interfaces. We also discuss and evaluate 7 factors for their parametric design in additive and constructive methods. To demonstrate the feasibility of our approach and the breadth of new designs that it enables, we developed 5 prototypes: 3 wearables, a piece of furniture and a soft toy. Studying Soft Speakers with maker-users expanded the design space, empowering users and supporting inclusive design. Our study includes insights on user experience of real-world interactive applications for remote communication, e-learning, entertainment, navigation and gaming, enabled by Soft Speakers’ customizable and scalable form factor.
DOI
PDF
Video
Page
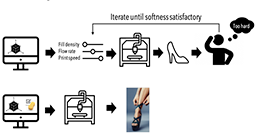
OmniSoft: A Design Tool for Soft Objects by Example (ACM TEI 2021)
Softness is one of the most important factors in human tactile perception. With recent advances in 3Dprinting, there has been significant progress in fabricating compliant objects. However, existing methods typically remain inaccessible to end-users, mainly due to the separation between designing shapes and setting printing parameters to achieve desired softness, resulting in the exclusion of its customization in early design processes. In this work, we contribute an end-to-end design tool that takes a design-by-example approach: given a 3D model, a user can specify the region of interest and a level of softness, by shopping everyday objects as a reference. The tool then generates both geometry and 3D printing parameters to reproduce the desired softness, which can be fabricated using low-cost FDM 3D printing and materials for it. We also provide a data-driven pipeline to enable other compliance modeling methods to be generalized within our design tool. In two user studies, we demonstrated that users could easily locate existing reference objects’ softness to a 3D printed object. In a design session, end-users successfully used OmniSoft to design augmented functions.
DOI
PDF
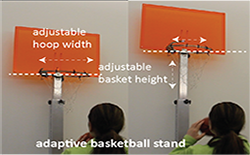
Can Physical Tools that Adapt their Shape based on a Learner’s Performance Help in Motor Skill Training? (ACM TEI 2021)
Softness is one of the most important factors in human tactile perception. With recent advances in 3Dprinting, there has been significant progress in fabricating compliant objects. However, existing methods typically remain inaccessible to end-users, mainly due to the separation between designing shapes and setting printing parameters to achieve desired softness, resulting in the exclusion of its customization in early design processes. In this work, we contribute an end-to-end design tool that takes a design-by-example approach: given a 3D model, a user can specify the region of interest and a level of softness, by shopping everyday objects as a reference. The tool then generates both geometry and 3D printing parameters to reproduce the desired softness, which can be fabricated using low-cost FDM 3D printing and materials for it. We also provide a data-driven pipeline to enable other compliance modeling methods to be generalized within our design tool. In two user studies, we demonstrated that users could easily locate existing reference objects’ softness to a 3D printed object. In a design session, end-users successfully used OmniSoft to design augmented functions.
DOI
PDF
Video
Page

The Machine Learning Machine: A Tangible User Interface for Teaching Machine Learning (ACM TEI 2021)
Machine Learning (ML) is often used invisibly in everyday applications with little opportunity for consumers to investigate how it works. In this paper, we expand recent efforts to unfold what students should know about ML and how to design tools and activities allowing them to engage with ML. To do so, we explore how to make processes and aspects of ML tangible through the design of the Machine Learning Machine (MLM); a tangible user interface which enables students to create their own data-sets using pen and paper and to iteratively build and test ML models using this data. Based on insights from the design process and a preliminary pilot study with the MLM, we discuss how a tangible approach to engaging with ML can spur curiosity in students and how the iterative process of improving ML models can encourage students to reflect on the relation between data, model and predictions.
DOI
PDF
Video
Page

Seedmarkers: Embeddable Markers for Physical Objects (ACM TEI 2021)
We present Seedmarkers, shape-independent topological markers that can be embedded in physical objects manufactured with common rapid-prototyping techniques. Many markers are optimized for technical performance while visual appearance or the feasibility of permanently merging marker and physical object is not considered. We give an overview of the aesthetic properties of a wide range of existing markers and conducted a short online survey to assess the perception of popular marker designs. Based on our findings we introduce our generation algorithm making use of weighted Voronoi diagrams for topological optimization. With our generator, Seedmarkers can be created from technical drawings during the design process to fill arbitrary shapes on any surface. Given dimensions and manufacturing constraints, different configurations for 3 or 6 degrees of freedom tracking are possible. We propose a set of application examples for shape-independent markers, including 3D printed tangibles, laser cut plates and functional markers on printed circuit boards.
DOI
PDF
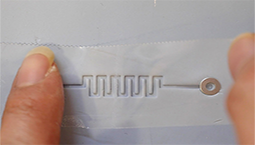
Flowcuits: Crafting Tangible and Interactive Electrical Components with Liquid Metal Circuits (ACM TEI 2021)
We present Flowcuits, a DIY fabrication method to prototype tangible, interactive and functional electrical components by manipulating liquid metals. The prototypes afford both physical and visual interactions to demonstrate the inner working mechanics of fundamental electronic elements, which enables tangible and playful learning. The fabrication process follows simple imprinting and sealing of fluidic circuits with a 3D-printed stamp on an accessible moldable-substrates such as ‘Blu Tack’. Utilizing conductive gallium indium liquid metal, we demonstrated interactive and re-configurable electronic components such as switches, variable resistors, variable capacitors, logic gates and pressure sensors. In this paper, we present the design analogy of Flowcuits, DIY fabrication approach including a parametric 3D stamp design toolkit and results from a technical evaluation. The stamps are printed with a low-cost 3D printer and all the materials are inexpensive and reusable, enabling Flowcuits to be easily used without any advanced lab facilities.
DOI
PDF

Skill-Sleeves: Designing Electrode Garments for Wearability (ACM TEI 2021)
We present Flowcuits, a DIY fabrication method to prototype tangible, interactive and functional electrical components by manipulating liquid metals. The prototypes afford both physical and visual interactions to demonstrate the inner working mechanics of fundamental electronic elements, which enables tangible and playful learning. The fabrication process follows simple imprinting and sealing of fluidic circuits with a 3D-printed stamp on an accessible moldable-substrates such as ‘Blu Tack’. Utilizing conductive gallium indium liquid metal, we demonstrated interactive and re-configurable electronic components such as switches, variable resistors, variable capacitors, logic gates and pressure sensors. In this paper, we present the design analogy of Flowcuits, DIY fabrication approach including a parametric 3D stamp design toolkit and results from a technical evaluation. The stamps are printed with a low-cost 3D printer and all the materials are inexpensive and reusable, enabling Flowcuits to be easily used without any advanced lab facilities.
DOI
PDF
2020
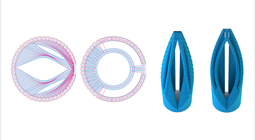
Morph & Slerp: Shape description for 3D printing of concrete (ACM Symposium on Computational Fabrication 2020)
Synthesis of shapes that are guaranteed to be physically produced by Robotic 3D printing of concrete, needs research attention. This is necessitated by the rapid development of the hardware, commercial availability of and interest in concrete printing. Further the need is amplified by the lack of easy-to-implement-and-use shape-design tools. Together, they provide the context of the proposed work.
A necessary feature for geometries to be ‘printable’ is that each consecutive layer onto which material is deposited should change gradually such that it has sufficient overlap with the preceding layer (spatial coherence of print paths). The computational handling of these aspects have been introduced by Bhooshan et al. (2018) including the use of a time evolving scalar-field to represent the shape to be designed – the so-called Function Representation (FRep). This paper significantly extends the previous work by (a) fully parametrising the shape description for 3D printing of concrete by decomposing the shape as a combination of shape interpolation (Morph) and affine interpolation (Slerp), and (b) replacing the linear, cross-fading interpolation scheme resulting in physically problematic artefacts with a scheme that produces smooth, spatially coherent outcomes.
An easy-to-implement software application has been prototyped. It couples the shape description with a guiding heuristic to design topologically complex, physically plausible shapes with relative ease. The coupling significantly reduces the effort and expertise needed to produce shapes that are printable whilst also providing intuitive, visual feedback to designers. This is particularly useful in the current context where computer simulation of the stability of the layers during printing is actively being developed, experimental in nature and still computationally expensive. The presented approach does not, however, automatically guarantee printable outputs. The shape description and outputs may, nonetheless, be readily used as good candidates for further optimisation to guarantee print readiness.
DOI
PDF
Page
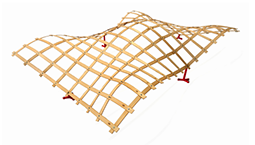
Design and Fabrication of Elastic Geodesic Grid Structures (ACM Symposium on Computational Fabrication 2020)
Elastic geodesic grids (EGG) are lightweight structures that can be easily deployed to approximate designer provided free-form surfaces. In the initial configuration the grids are perfectly flat, during deployment, though, curvature is induced to the structure, as grid elements bend and twist. Their layout is found geometrically, it is based on networks of geodesic curves on free-form design-surfaces. Generating a layout with this approach encodes an elasto-kinematic mechanism to the grid that creates the curved shape during deployment. In the final state the grid can be fixed to supports and serve for all kinds of purposes like free-form sub-structures, paneling, sun and rain protectors, pavilions, etc.
However, so far these structures have only been investigated using small-scale desktop models. We investigate the scalability of such structures, presenting a medium sized model. It was designed by an architecture student without expert knowledge on elastic structures or differential geometry, just using the elastic geodesic grids design-pipeline. We further present a fabrication-process for EGG-models. They can be built quickly and with a small budget.
DOI
PDF
Page

Geometry-based structural form-finding to design architected cellular solids (ACM Symposium on Computational Fabrication 2020)
In this paper, we introduce a geometry-based structural design method as an alternative approach for designing low-density structures applicable to material science and mechanical engineering. This method will provide control over internal force-flow, boundary condition, and applied loads. The methodology starts with an introduction to the principles of geometric equilibrium and continues by introducing multiple design techniques to generate truss cellular, polyhedron cellular, and shell cellular (or Shellular) materials by manipulating the geometry of the equilibrium of force. The research concludes by evaluating the mechanical performance of a range of cellular structures designed by this approach.
DOI
PDF
Page
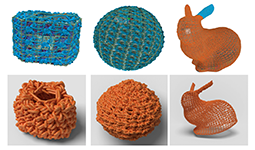
Representing Crochet with Stitch Meshes (ACM Symposium on Computational Fabrication 2020)
Crochet is a fabrication technique in which a 3D surface is created from yarn by interlacing loops formed with a special hook. Crochet patterns are typically represented using a standardized set of abstract pictorial symbols. Unfortunately, while this notation is enough for someone well-versed in the individual stitches, it does not directly show the yarn layout of stitches. This lack of specification makes it difficult for both novice users and computer programs to parse, visualize, and design crochet patterns.
We demonstrate how to represent crochet patterns within the “stitch mesh” paradigm. That is, the pattern is represented using a library of tiles, where each tile contains yarn geometry, and tiles connect along their edges. In order to adapt stitch meshes to crochet, we introduce a special edge type which captures the idea of the current loop – the loop of yarn held on the crochet hook during fabrication. We also create a library of mesh face types which model commonly-used crochet stitches. We illustrate the richness of the crochet stitch faces by showing a number of examples including patterns generated from 3D models.
DOI
PDF
Page
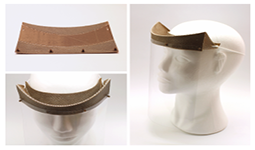
Self-shaping Curved Folding:: A 4D-printing method for fabrication of self-folding curved crease structures (ACM Symposium on Computational Fabrication 2020)
Curved folding, a method to create curved 3D structures from a flat sheet, can be used to produce material and manufacturing efficient, static or dynamic structures. However, the complex assembly and folding sequence of curved crease patterns is the bottleneck in their fabrication process. This paper presents Self-shaping Curved Folding: a material programming approach to create curved crease origami structures that self-assemble from flat into 3D folded state upon exposure to external stimuli. We propose a digital fabrication process via the 3D-printing of shape-changing materials, accompanied by a computational design workflow in which the geometry of a crease pattern is correlated with the printing toolpaths and the layup of stimuli-responsive and passive materials to achieve a target shape-change. We demonstrate our method by producing multiple prototypes and documenting their shape-change upon actuation. Lastly, we explore the functional and performance benefits of self-shaping curved folding under three application scenarios relevant to the field of industrial design and architecture.
DOI
PDF
Page

Print Paths Key-framing: Design for non-planar layered robotic FDM printing (ACM Symposium on Computational Fabrication 2020)
We present a method to design non-planar layered print paths for robotic fused deposition modeling (FDM) printing of single-shell surfaces. The advent of robotic arms has created great potential in the 3D printing industry for the realization of non-planar print paths that allow transitioning between different orientations during the print. However, this potential is often not fully realized due to the various challenges associated with the design of feasible non-planar print paths. Inspired by the ubiquitous key-framing technique in animation, where an input of limited degrees of freedom is used to describe a complex behavior, we propose a method to generate non-planar layered print paths subject to the input of the designer, by specifying a series of target curves on the surface of a mesh. Our method generates intermediary print paths with a direction that interpolates that of the targets while respecting the sequence and distances between neighboring paths imposed by fabrication constraints. The resulting print paths have variable layer height, and their realization relies on variable end-effector orientation. We present several examples and fabricated prototypes and make qualitative comparisons to planar slicing, to showcase the capabilities of our method.
DOI
PDF
Page
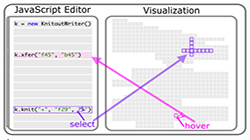
Coupling Programs and Visualization for Machine Knitting (ACM Symposium on Computational Fabrication 2020)
To effectively program knitting machines, like any fabrication machine, users must be able to place the code they write in correspondence with the output the machine produces. This mapping is used in the code-to-output direction to understand what their code will produce, and in the output-to-code direction to debug errors in the finished product. In this paper, we describe and demonstrate an interface that provides two-way coupling between high- or low-level knitting code and a topological visualization of the knitted output. Our system allows the user to locate the knitting machine operations generated by any selected code, as well as the code that generates any selected knitting machine operation. This link between the code and visualization has the potential to reduce the time spent in design, implementation, and debugging phases, and save material costs by catching errors before actually knitting the object. We show examples of patterns designed using our tool and describe common errors that the tool catches when used in an academic lab setting and an undergraduate course.
DOI
PDF
Video
Page
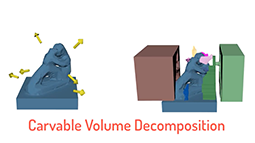
VDAC: Volume Decompose-and-Carve for Subtractive Manufacturing (ACM Transactions on Graphics 2020)
We introduce carvable volume decomposition for efficient 3-axis CNC machining of 3D freeform objects, where our goal is to develop a fully
automatic method to jointly optimize setup and path planning. We formulate our joint optimization as a volume decomposition problem
which prioritizes minimizing the number of setup directions while striving for a minimum number of continuously carvable volumes,
where a 3D volume is continuously carvable, or simply carvable, if it can be carved with the machine cutter traversing a single
continuous path. Geometrically, carvability combines visibility and monotonicity and presents a new shape property which had not
been studied before. Given a target 3D shape and the initial material block, our algorithm first finds the minimum number of carving
directions by solving a set cover problem. Specifically, we analyze cutter accessibility and select the carving directions based on
an assessment of how likely they would lead to a small carvable volume decomposition. Next, to obtain a minimum decomposition based
on the selected carving directions efficiently, we narrow down the solution search by focusing on a special kind of points in the
residual volume, single access or SA points, which are points that can be accessed from one and only one of the selected carving
directions. Candidate carvable volumes are grown starting from the SA points. Finally, we devise an energy term to evaluate the
carvable volumes and their combinations, leading to the final decomposition. We demonstrate the performance of our decomposition
algorithm on a variety of 2D and 3D examples and evaluate it against the ground truth, where possible, and solutions provided by
human experts. Physically machined models are produced where each carvable volume is continuously carved following a connected
Fermat spiral toolpath.
DOI
PDF
Video
Page
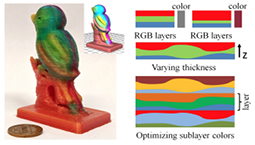
Colored Fused Filament Fabrication (ACM SIGGRAPH 2020)
Fused filament fabrication is the method of choice for printing 3D models at low cost and is the de facto standard for hobbyists, makers, and schools. Unfortunately, filament printers cannot truly reproduce colored objects. The best current techniques rely on a form of dithering exploiting occlusion, which was only demonstrated for shades of two base colors and behaves differently depending on surface slope.
We explore a novel approach for 3D-printing colored objects, capable of creating controlled gradients of varying sharpness. Our technique exploits off-the-shelf nozzles that are designed to mix multiple filaments in a small melting chamber, obtaining intermediate colors once the mix is stabilized.
We apply this property to produce color gradients. We divide each input layer into a set of strata, each having a different constant color. By locally changing the thickness of the stratum, we change the perceived color at a given location. By optimizing the choice of colors of each stratum, we further improve quality and allow the use of different numbers of input filaments.
We demonstrate our results by building a functional color printer using low-cost, off-the-shelf components. Using our tool, a user can paint a 3D model and directly produce its physical counterpart using any material and color available for fused filament fabrication.
DOI
PDF
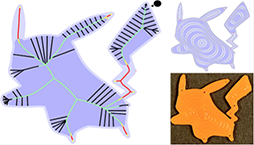
Variable-width contouring for additive manufacturing (ACM SIGGRAPH 2020)
In most layered additive manufacturing processes, a tool solidifies or deposits material while following pre-planned trajectories to form solid beads. Many interesting problems arise in this context, among which one concerns the planning of trajectories for filling a planar shape as densely as possible. This is the problem we tackle in the present paper. Recent works have shown that allowing the bead width to vary along the trajectories helps increase the filling density. We present a novel technique that, given a deposition width range, constructs a set of closed beads whose width varies within the prescribed range and fill the input shape. The technique outperforms the state of the art in important metrics: filling density (while still guaranteeing the absence of bead overlap) and trajectories smoothness. We give a detailed geometric description of our algorithm, explore its behavior on example inputs and provide a statistical comparison with the state of the art. We show that it is possible to obtain high quality fabricated layers on commodity FDM printers.
DOI
PDF
Page
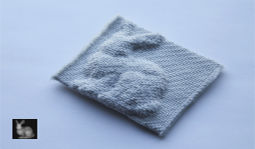
Automatic structure synthesis for 3D woven relief (ACM SIGGRAPH 2020)
3D weaving is a manufacturing technique that creates multilayer textiles with substantial thickness. Currently, the primary use for these materials is in regularly structured carbon-polymer or glass-polymer composites, but in principle a wide range of complex shapes can be achieved, providing the opportunity to customize the fiber structure for individual parts and also making 3D weaving appealing in many soft-goods applications. The primary obstacle to broader use is the need to design intricate weave structures, involving tens to hundreds of thousands of yarn crossings, which are different for every shape to be produced. The goal of this research is to make 3D weaving as readily usable as CNC machining or 3D printing, by providing an algorithm to convert an arbitrary 3D solid model into machine instructions to weave the corresponding shape. We propose a method to generate 3D weaving patterns for height fields by slicing the shape along intersecting arrays of parallel planes and then computing the paths for all the warp and weft yarns, which travel in these planes. We demonstrate the method by generating weave structures for different shapes and fabricating a number of examples in polyester yarn using a Jacquard loom.
DOI
PDF
Page
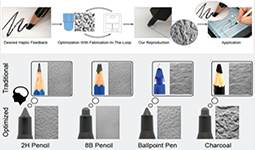
Fabrication-in-the-loop co-optimization of surfaces and styli for drawing haptics (ACM SIGGRAPH 2020)
Digital drawing tools are now standard in art and design workflows. These tools offer comfort, portability, and precision as well as native integration with digital-art workflows, software, and tools. At the same time, artists continue to work with long-standing, traditional drawing tools. One feature of traditional tools, well-appreciated by many artists and lacking in digital tools, is the specific and diverse range of haptic responses provided by them. Haptic feedback in traditional drawing tools provides unique, per-tool responses that help determine the precision and character of individual strokes. In this work, we address the problem of fabricating digital drawing tools that closely match the haptic feedback of their traditional counterparts. This requires the formulation and solution of a complex, co-optimization of both digital styli and the drawing surfaces they move upon. Here, a potentially direct formulation of this optimization with numerical simulation-in-the-loop is not yet viable. As in many complex design tasks, state-of-the-art methods do not currently offer predictive modeling at rates and scales that can account for the numerous, coupled, physical behaviors governing the haptics of styli and surfaces, nor for the limitations and uncertainties inherent in their fabrication processes. To address these challenges, we propose fabrication-in-the-loop optimization. Critical to making this strategy practical we construct our objective via a Gaussian Process that does not require computing derivatives with respect to design parameters. Our Gaussian Process surrogate model then provides both function estimates and confidence intervals that guide the efficient sampling of our design space. In turn, this sampling critically reduces the numbers of fabricated examples during exploration and automatically handles exploration-exploitation trade-offs. We apply our method to fabricate drawing tools that provide a wide range of haptic feedback, and demonstrate that they are often hard for users to distinguish from their traditional drawing-tool analogs.
DOI
PDF
Video
Page
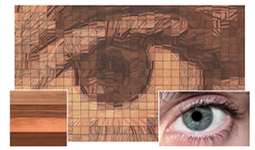
Computational Parquetry: Fabricated Style Transfer with Wood Pixels (ACM SIGGRAPH 2020)
Parquetry is the art and craft of decorating a surface with a pattern of differently colored veneers of wood, stone, or other materials. Traditionally, the process of designing and making parquetry has been driven by color, using the texture found in real wood only for stylization or as a decorative effect. Here, we introduce a computational pipeline that draws from the rich natural structure of strongly textured real-world veneers as a source of detail to approximate a target image as faithfully as possible using a manageable number of parts. This challenge is closely related to the established problems of patch-based image synthesis and stylization in some ways, but fundamentally different in others. Most importantly, the limited availability of resources (any piece of wood can only be used once) turns the relatively simple problem of finding the right piece for the target location into the combinatorial problem of finding optimal parts while avoiding resource collisions. We introduce an algorithm that efficiently solves an approximation to the problem. It further addresses challenges like gamut mapping, feature characterization, and the search for fabricable cuts. We demonstrate the effectiveness of the system by fabricating a selection of pieces of parquetry from different kinds of unstained wood veneer.
DOI
PDF
Page
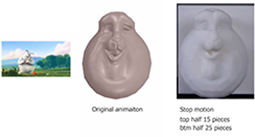
A System for Efficient 3D Printed Stop-motion Face Animation (ACM SIGGRAPH 2020)
Computer animation in conjunction with 3D printing has the potential to positively impact traditional stop-motion animation. As 3D printing every frame of a computer animation is prohibitively slow and expensive, 3D printed stop-motion can only be viable if animations can be faithfully reproduced using a compact library of 3D printed and efficiently assemblable parts. We thus present the first system for processing computer animation sequences (typically faces) to produce an optimal set of replacement parts for use in 3D printed stop-motion animation. Given an input animation sequence of topology invariant deforming meshes, our problem is to output a library of replacement parts and per-animation-frame assignment of the parts, such that we maximally approximate the input animation, while minimizing the amount of 3D printing and assembly. Inspired by current stop-motion workflows, a user manually indicates which parts of the model are preferred for segmentation; then, we find curves with minimal deformation along which to segment the mesh. We then present a novel algorithm to zero out deformations along the segment boundaries, so that replacement sets for each part can be interchangeably and seamlessly assembled together. The part boundaries are designed to ease 3D printing and instrumentation for assembly. Each part is then independently optimized using a graph-cut technique to find a set of replacements, whose size can be user defined, or automatically computed to adhere to a printing budget or allowed deviation from the original animation. Our evaluation is threefold: we show results on a variety of facial animations, both digital and 3D printed, critiqued by a professional animator; we show the impact of various algorithmic parameters; and we compare our results to naive solutions. Our approach can reduce the printing time and cost significantly for stop-motion animated films.
DOI
PDF
Video
Page
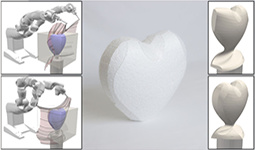
RoboCut: hot-wire cutting with robot-controlled flexible rods (ACM SIGGRAPH 2020)
Hot-wire cutting is a subtractive fabrication technique used to carve foam and similar materials. Conventional machines rely on straight wires and are thus limited to creating piecewise ruled surfaces. In this work, we propose a method that exploits a dual-arm robot setup to actively control the shape of a flexible, heated rod as it cuts through the material. While this setting offers great freedom of shape, using it effectively requires concurrent reasoning about three tightly coupled sub-problems: 1) modeling the way in which the shape of the rod and the surface it sweeps are governed by the robot's motions; 2) approximating a target shape through a sequence of surfaces swept by the equilibrium shape of an elastic rod; and 3) generating collision-free motion trajectories that lead the robot to create desired sweeps with the deformable tool. We present a computational framework for robotic hot wire cutting that addresses all three sub-problems in a unified manner. We evaluate our approach on a set of simulated results and physical artefacts generated with our robotic fabrication system.
DOI
PDF
Video
Page

Computational image marking on metals via laser induced heating (ACM SIGGRAPH 2020)
Laser irradiation induces colors on some industrially important materials, such as stainless steel and titanium. It is however challenging to find marking configurations that create colorful, high-resolution images. The brute-force solution to the gamut exploration problem does not scale with the high-dimensional design space of laser marking. Moreover, there exists no color reproduction workflow capable of reproducing color images with laser marking. Here, we propose a measurement-based, data-driven performance space exploration of the color laser marking process. We formulate this exploration as a search for the Pareto optimal solutions to a multi-objective optimization and solve it using an evolutionary algorithm. The explored set of diverse colors is then utilized to mark high-quality, full-color images.
DOI
PDF
Video
Page

Pop-up Print: Rapidly 3D Printing Mechanically Reversible Objects in the Folded State (ACM UIST 2020)
Despite recent advancements in 3D printing technology, which allows users to rapidly produce 3D objects, printing tall and/or large objects still consumes more time and large amount of support material. In order to address these problems, we propose Pop-up Print, a method to 3D print an object in a compact "folded" state and then unfold it after printing to achieve the final artifact. Using this method, we can reduce the object's print height and volume, which directly affects the printing time and support material consumption. In addition, thanks to the reversibility of folding/unfolding, we can reversibly minimize the printed object's volume when unused for storage or transportation, and expand it only in use. To achieve Pop-up Print, we first conducted an experiment using selected printed sample objects with several parameters, in order to determine suitable crease patterns that make both the unfolded and folded state mechanically stable. Based on this result, we developed an interactive design tool to convert 3D models - such as a Stanford Bunny or a Huffman's cone - to the folded shape. Our design tool allows users to decide non-intuitive parameters that may affect the form's mechanical stability, while maintaining both functional crease patterns and the object's original form factor. Finally, we demonstrate the feasibility of our method through several examples of folded objects.
DOI
PDF
Video

SimuLearn: Fast and Accurate Simulator to Support Morphing Materials Design and Workflows (ACM UIST 2020)
Morphing materials allow us to create new modalities of interaction and fabrication by leveraging the materials? dynamic behaviors. Yet, despite the ongoing rapid growth of computational tools within this realm, current developments are bottlenecked by the lack of an effective simulation method. As a result, existing design tools must trade-off between speed and accuracy to support a real-time interactive design scenario. In response, we introduce SimuLearn, a data-driven method that combines finite element analysis and machine learning to create real-time (0.61 seconds) and truthful (97% accuracy) morphing material simulators. We use mesh-like 4D printed structures to contextualize this method and prototype design tools to exemplify the design workflows and spaces enabled by a fast and accurate simulation method. Situating this work among existing literature, we believe SimuLearn is a timely addition to the HCI CAD toolbox that can enable the proliferation of morphing materials.
DOI
PDF
Video
Page
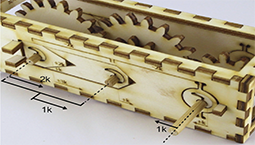
Kerf-Canceling Mechanisms: Making Laser-Cut Mechanisms Operate across Different Laser Cutters (ACM UIST 2020)
Getting laser-cut mechanisms, such as those in micro-scopes, robots, vehicles, etc., to work, requires all their components to be dimensioned precisely. This precision, however, tends to be lost when fabricating on a differ-ent laser cutter, as it is likely to remove more or less mate-rial (aka 'kerf'). We address this with what we call kerf-canceling mechanisms. Kerf-canceling mechanisms replace laser-cut bearings, sliders, gear pairs, etc. Unlike their tradi-tional counterparts, however, they keep working when manufactured on a different laser cutter and/or with different kerf. Kerf-canceling mechanisms achieve this by adding an additional wedge element per mechanism. We have created a software tool KerfCanceler that locates traditional mecha-nisms in cutting plans and replaces them with their kerf-canceling counterparts. We evaluated our tool by converting 17 models found online to kerf-invariant models; we evaluated kerf-canceling bearings by testing with kerf values ranging from 0mm and 0.5mm and find that they perform reliably independent of this kerf.
DOI
PDF
Video
Page

LamiFold: Fabricating Objects with Integrated Mechanisms Using a Laser cutter Lamination Workflow (ACM UIST 2020)
We present LamiFold, a novel design and fabrication workflow for making functional mechanical objects using a laser cutter. Objects fabricated with LamiFold embed advanced rotary, linear, and chained mechanisms, including linkages that support fine-tuning and locking position. Laser cutting such mechanisms without LamiFold requires designing for and embedding off-the-shelf parts such as springs, bolts, and axles for gears. The key to laser cutting our functional mechanisms is the selective cutting and gluing of stacks of sheet material. Designing mechanisms for this workflow is non-trivial, therefore we contribute a set of mechanical primitives that are compatible with our lamination workflow and can be combined to realize advanced mechanical systems. Our software design environment facilitates the process of inserting and composing our mechanical primitives and realizing functional laser-cut objects.
DOI
PDF
Video
Page
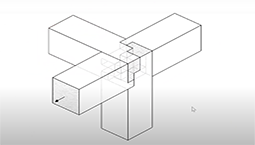
Tsugite: Interactive Design and Fabrication of Wood Joints (ACM UIST 2020)
We present Tsugite - an interactive system for designing and fabricating wood joints for frame structures. To design and manually craft such joints is difficult and time consuming. Our system facilitates the creation of custom joints by a modeling interface combined with computer numerical control (CNC) fabrication. The design space is a 3D grid of voxels that enables efficient geometrical analysis and combinatorial search. The interface has two modes: manual editing and gallery. In the manual editing mode, the user edits a joint while receiving real-time graphical feedback and suggestions provided based on performance metrics including slidability, fabricability, and durability with regard to the direction of fiber. In the gallery mode, the user views and selects feasible joints that have been pre-calculated. When a joint design is finalized, it can be manufactured with a 3-axis CNC milling machine using a specialized path planning algorithm that ensures joint assemblability by corner rounding. This system was evaluated via a user study and by designing and fabricating joint samples and functional furniture.
DOI
PDF
Video
Page
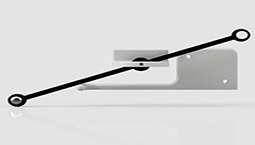
MechanoBeat: Monitoring Interactions with Everyday Objects using 3D Printed Harmonic Oscillators and Ultra-Wideband Radar (ACM UIST 2020)
In this paper we present MechanoBeat, a 3D printed mechanical tag that oscillates at a unique frequency upon user interaction. With the help of an ultra-wideband (UWB) radar array, MechanoBeat can unobtrusively monitor interactions with both stationary and mobile objects. MechanoBeat consists of small, scalable, and easy-to-install tags that do not require any batteries, silicon chips, or electronic components. Tags can be produced using commodity desktop 3D printers with cheap materials. We develop an efficient signal processing and deep learning method to locate and identify tags using only the signals reflected from the tag vibrations. MechanoBeat is capable of detecting simultaneous interactions with high accuracy, even in noisy environments. We leverage UWB radar signals' high penetration property to sense interactions behind walls in a non-line-of-sight (NLOS) scenario. A number of applications using MechanoBeat have been explored and the results have been presented in the paper.
DOI
PDF
Video
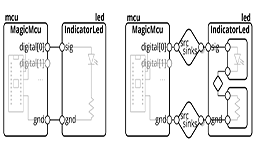
Polymorphic Blocks: Unifying High-level Specification and Low-level Control for Circuit Board Design (ACM UIST 2020)
Mainstream board-level circuit design tools work at the lowest level of design --- schematics and individual components. While novel tools experiment with higher levels of design, abstraction often comes at the expense of the fine-grained control afforded by low-level tools. In this work, we propose a hardware description language (HDL) approach that supports users at multiple levels of abstraction from broad system architecture to subcircuits and component selection. We extend the familiar hierarchical block diagram with polymorphism to include abstract-typed blocks (e.g., generic resistor supertype) and electronics modeling (i.e., currents and voltages). Such an approach brings the advantages of reusability and encapsulation from object-oriented programming, while addressing the unique needs of electronics designers such as physical correctness verification. We discuss the system design, including fundamental abstractions, the block diagram construction HDL, and user interfaces to inspect and fine-tune the design; demonstrate example designs built with our system; and present feedback from intermediate-level engineers who have worked with our system.
DOI
PDF
Video
MorphSensor: A 3D Electronic Design Tool for Reforming Sensor Modules (ACM UIST 2020)
MorphSensor is a 3D electronic design tool that enables designers to morph existing sensor modules of pre-defined two-dimensional shape into free-form electronic component arrangements that better integrate with the three-dimensional shape of a physical prototype. MorphSensor builds onto existing sensor module schematics that already define the electronic components and the wiring required to build the sensor. Since MorphSensor maintains the wire connections throughout the editing process, the sensor remains fully functional even when designers change the electronic component layout on the prototype geometry. We detail the MorphSensor editor that supports designers in re-arranging the electronic components, and discuss a fabrication pipeline based on customized PCB footprints for making the resulting freeform sensor. We then demonstrate the capabilities of our system by morphing a range of sensor modules of different complexity and provide a technical evaluation of the quality of the resulting free-form sensors.
DOI
PDF
Video
Page

BodyPrinter: Fabricating Circuits Directly on the Skin at Arbitrary Locations Using a Wearable Compact Plotter (ACM UIST 2020)
On-body electronics and sensors offer the opportunity to seamlessly augment the human with computing power. Accordingly, numerous previous work investigated methods that exploit conductive materials and flexible substrates to fabricate circuits in the form of wearable devices, stretchable patches, and stickers that can be attached to the skin. For all these methods, the fabrication process involves several manual steps, such as designing the circuit in software, constructing conductive patches, and manually placing these physical patches on the body. In contrast, in this work, we propose to fabricate electronics directly on the skin. We present BodyPrinter, a wearable conductive-ink deposition machine, that prints flexible electronics directly on the body using skin-safe conductive ink. The paper describes our system in detail and, through a series of examples and a technical evaluation, we show how direct on-body fabrication of electronic circuits and sensors can further enhance the human body.
DOI
PDF
Video
Page

Capacitivo: Contact-Based Object Recognition on Interactive Fabrics using Capacitive Sensing (ACM UIST 2020)
We present Capacitivo, a contact-based object recognition technique developed for interactive fabrics, using capacitive sensing. Unlike prior work that has focused on metallic objects, our technique recognizes non-metallic objects such as food, different types of fruits, liquids, and other types of objects that are often found around a home or in a workplace. To demonstrate our technique, we created a prototype composed of a 12 x 12 grid of electrodes, made from conductive fabric attached to a textile substrate. We designed the size and separation between the electrodes to maximize the sensing area and sensitivity. We then used a 10-person study to evaluate the performance of our sensing technique using 20 different objects, which yielded a 94.5% accuracy rate. We conclude this work by presenting several different application scenarios to demonstrate unique interactions that are enabled by our technique on fabrics.
DOI
PDF
Video
Page
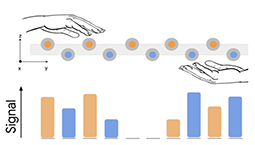
ZebraSense: A Double-sided Textile Touch Sensor for Smart Clothing (ACM UIST 2020)
ZebraSense is a novel dual-sided woven touch sensor that can recognize and differentiate interactions on the top and bottom surfaces of the sensor. ZebraSense is based on an industrial multi-layer textile weaving technique, yet it enables a novel capacitive sensing paradigm, where each sensing element contributes to touch detection on both surfaces of the sensor simultaneously. Unlike the common "sensor sandwich" approach used in previous work, ZebraSense inherently minimizes the number of sensing elements, which drastically simplifies both sensor construction and its integration into soft goods, while preserving maximum sensor resolution. The experimental evaluation confirmed the validity of our approach and demonstrated that ZebraSense is a reliable, efficient, and accurate solution for detecting user gestures in various dual-sided interaction scenarios, allowing for new use cases in smart apparel, home decoration, toys, and other textile objects.
DOI
PDF
Video

Sonoflex: Embroidered Speakers Without Permanent Magnets (ACM UIST 2020)
We present Sonoflex, a thin-form, embroidered dynamic speaker made without using a permanent magnet. Our design consists of two flat spiral coils, stacked on top of each other, and is based on an isolated, thin (0.15 mm) enameled copper wire. Our approach allows for thin, lightweight, and textile speakers and does not require high voltage as in electrostatic speakers. We show how the speaker can be designed and fabricated and evaluate its acoustic properties as a function of manufacturing parameters (size, turn counts, turn spacing, and substrate materials). The experiment results revealed that we can produce audible sound with a broad frequency range (1.5 kHz - 20 kHz) with the embroidered speaker with a diameter of 50 mm. We conclude the paper by presenting several applications such as audible notifications and near-ultrasound communication.
DOI
PDF
Video
Page

HERMITS: Dynamically Reconfiguring the Interactivity of Self-propelled TUIs with Mechanical Shell Add-ons (ACM UIST 2020)
We introduce HERMITS, a modular interaction architecture for self-propelled Tangible User Interfaces (TUIs) that incorporates physical add-ons, referred to as mechanical shells. The mechanical shell add-ons are intended to be dynamically reconfigured by utilizing the locomotion capability of self-propelled TUIs (e.g. wheeled TUIs, swarm UIs). We developed a proof-of-concept system that demonstrates this novel architecture using two-wheeled robots and a variety of mechanical shell examples. These mechanical shell add-ons are passive physical attatchments that extend the primitive interactivities (e.g. shape, motion and light) of the self-propelled robots.
The paper proposes the architectural design, interactive functionality of HERMITS as well as design primitives for mechanical shells. The paper also introduces the prototype implementation that is based on an off-the-shelf robotic toy with a modified docking mechanism. A range of applications is demonstrated with the prototype to motivate the collective and dynamically reconfigurable capability of the modular architecture, such as an interactive mobility simulation, an adaptive home/desk environment, and a story-telling narrative. Lastly, we discuss the future research opportunity of HERMITS to enrich the interactivity and adaptability of actuated and shape changing TUIs.
DOI
PDF
Video
Page

Romeo: A Design Tool for Embedding Transformable Parts in 3D Models to Robotically Augment Default Functionalities (ACM UIST 2020)
Reconfiguring shapes of objects enables transforming existing passive objects with robotic functionalities, e.g., a transformable coffee cup holder can be attached to a chair's armrest, a piggy bank can reach out an arm to 'steal' coins. Despite the advance in end-user 3D design and fabrication, it remains challenging for non-experts to create such 'transformables' using existing tools due to the requirement of specific engineering knowledge such as mechanisms and robotic design.
We present Romeo -- a design tool for creating transformables to robotically augment objects' default functionalities. Romeo allows users to transform an object into a robotic arm by expressing at a high level what type of task is expected. Users can select which part of the object to be transformed, specify motion points in space for the transformed part to follow and the corresponding action to be taken. Romeo then automatically generates a robotic arm embedded in the transformable part ready for fabrication. A design session validated this tool where participants used Romeo to accomplish controlled design tasks and to open-endedly create coin-stealing piggy banks by transforming 3D objects of their own choice.
DOI
PDF
Video
Page

poimo: Portable and Inflatable Mobility Devices Customizable for Personal Physical Characteristics (ACM UIST 2020)
Despite the recent growth in popularity of personal mobility devices (e.g., e-scooters and e-skateboards), they still suffer from limited safety and narrow design form factors, due to their rigid structures. On the other hand, inflatable interfaces studied in human-computer interaction can achieve large volume change by simple inflation/deflation. Inflatable structure also offers soft and safe interaction owing to material compliance and diverse fabrication methods that lead to a wide range of forms and aesthetics. In this paper, we propose poimo, a new family of POrtable and Inflatable MObility devices, which consists of inflatable frames, inflatable wheels, and inflatable steering mechanisms made of a mass-manufacturable material called drop-stitch fabric. First, we defined the basic material properties of a drop-stitch inflatable structure that is sufficiently strong to carry a person while simultaneously allowing soft deformation and deflation for storage and portability. We then implemented an interactive design system that can scan the user's desired riding posture to generate a customized personal mobility device and can add the user's shape and color preferences. To demonstrate the custom-design capability and mobility, we designed several 3D models using our system and built physical samples for two basic templates: a motorcycle and a wheelchair. Finally, we conducted an online user study to examine the usability of the design system and share lessons learned for further improvements in the design and fabrication of poimo.
DOI
PDF
Video

Programmable Filament: Printed Filaments for Multi-material 3D Printing (ACM UIST 2020)
From full-color objects to functional capacitive artifacts, 3D printing multi-materials became essential to broaden the application areas of digital fabrication. We present Programmable Filament, a novel technique that enables multi-material printing using a commodity FDM 3D printer, requiring no hardware upgrades. Our technique builds upon an existing printing technique in which multiple filament segments are printed and spliced into a single threaded filament. We propose an end-to-end pipeline for 3D printing an object in multi-materials, with an introduction of the design systems for end-users. Optimized for low-cost, single-nozzle FDM 3D printers, the system is built upon our computational analysis and experiments to enhance its validity over various printers and materials to design and produce a programmable filament. Finally, we discuss application examples and speculate the future with its potential, such as custom filament manufacturing on-demand.
DOI
PDF
Video
Page
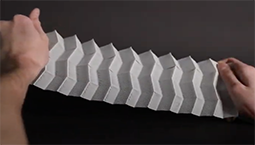
DefeXtiles: 3D Printing Quasi-Woven Fabric via Under-Extrusion (ACM UIST 2020)
We present DefeXtiles, a rapid and low-cost technique to produce tulle-like fabrics on unmodified fused deposition modeling (FDM) printers. The under-extrusion of filament is a common cause of print failure, resulting in objects with periodic gap defects. In this paper, we demonstrate that these defects can be finely controlled to quickly print thinner, more flexible textiles than previous approaches allow. Our approach allows hierarchical control from micrometer structure to decameter form and is compatible with all common 3D printing materials.
In this paper, we introduce the mechanism of DefeXtiles, establish the design space through a set of primitives with detailed workflows, and characterize the mechanical properties of DefeXtiles printed with multiple materials and parameters. Finally, we demonstrate the interactive features and new use cases of our approach through a variety of applications, such as fashion design prototyping, interactive objects, aesthetic patterning, and single-print actuators.
DOI
PDF
Video
Page
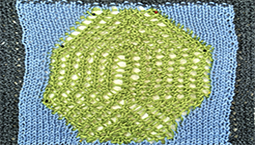
KnitGIST: A Programming Synthesis Toolkit for Generating Functional Machine-Knitting Textures (ACM UIST 2020)
Automatic knitting machines are robust, digital fabrication devices that enable rapid and reliable production of attractive, functional objects by combining stitches to produce unique physical properties. However, no existing design tools support optimization for desirable physical and aesthetic knitted properties. We present KnitGIST (Generative Instantiation Synthesis Toolkit for knitting), a program synthesis pipeline and library for generating hand- and machine-knitting patterns by intuitively mapping objectives to tactics for texture design. KnitGIST generates a machine-knittable program in a domain-specific programming language.
DOI
PDF
Video
Page

HapLinkage: Prototyping Haptic Proxies for Virtual Hand Tools Using Linkage Mechanism (ACM UIST 2020)
Haptic simulation of hand tools like wrenches, pliers, scissors and syringes are beneficial for finely detailed skill training in VR, but designing for numerous hand tools usually requires an expert-level knowledge of specific mechanism and protocol. This paper presents HapLinkage, a prototyping framework based on linkage mechanism, that provides typical motion templates and haptic renderers to facilitate proxy design of virtual hand tools. The mechanical structures can be easily modified, for example, to scale the size, or to change the range of motion by selectively changing linkage lengths. Resistant, stop, release, and restoration force feedback are generated by an actuating module as part of the structure. Additional vibration feedback can be generated with a linear actuator. HapLinkage enables easy and quick prototypting of hand tools for diverse VR scenarios, that embody both of their kinetic and haptic properties. Based on interviews with expert designers, it was confirmed that HapLinkage is expressive in designing haptic proxy of hand tools to enhance VR experiences. It also identified potentials and future development of the framework.
DOI
PDF
Video
Page

CurveBoards: Integrating Breadboards into Physical Objects to Prototype Function in the Context of Form (ACM CHI 2020)
CurveBoards are breadboards integrated into physical objects. In contrast to traditional breadboards, CurveBoards better preserve the object's look and feel while maintaining high circuit fluidity, which enables designers to exchange and reposition components during design iteration. Since CurveBoards are fully functional, i.e., the screens are displaying content and the buttons take user input, designers can test interactive scenarios and log interaction data on the physical prototype while still being able to make changes to the component layout and circuit design as needed. We present an interactive editor that enables users to convert 3D models into CurveBoards and discuss our fabrication technique for making CurveBoard prototypes. We also provide a technical evaluation of CurveBoard's conductivity and durability and summarize informal user feedback.
DOI
PDF
Video
Page
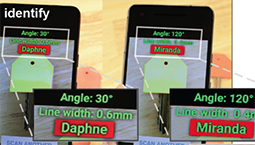
G-ID: Identifying 3D Prints Using Slicing Parameters (ACM CHI 2020)
We present G-ID, a method that utilizes the subtle patterns left by the 3D printing process to distinguish and identify objects that otherwise look similar to the human eye. The key idea is to mark different instances of a 3D model by varying slicing parameters that do not change the model geometry but can be detected as machine-readable differences in the print. As a result, G-ID does not add anything to the object but exploits the patterns appearing as a byproduct of slicing, an essential step of the 3D printing pipeline. We introduce the G-ID slicing & labeling interface that varies the settings for each instance, and the G-ID mobile app, which uses image processing techniques to retrieve the parameters and their associated labels from a photo of the 3D printed object. Finally, we evaluate our method’s accuracy under different lighting conditions, when objects were printed with different filaments and printers, and with pictures taken from various positions and angles.
DOI
PDF
Video
Page

Sprayable User Interfaces: Prototyping Large-Scale Interactive Surfaces with Sensors and Displays
(ACM CHI 2020)
We present Sprayable User Interfaces: room-sized interactive surfaces that contain sensor and display elements created by airbrushing functional inks. Since airbrushing is inherently mobile, designers can create large-scale user interfaces on complex 3D geometries where existing stationary fabrication methods fail.
To enable Sprayable User Interfaces, we developed a novel design and fabrication pipeline that takes a desired user interface layout as input and automatically generates stencils for airbrushing the layout onto a physical surface. After fabricating stencils from cardboard or projecting stencils digitally, designers spray each layer with an airbrush, attach a microcontroller to the user interface, and the interface is ready to be used.
Our technical evaluation shows that Sprayable User Inter-faces work on various geometries and surface materials, such as porous stone and rough wood. We demonstrate our system with several application examples including interac-tive smart home applications on a wall and a soft leather sofa, an interactive smart city application, and interactive architecture in public office spaces.
DOI
PDF
Video
Page

Kirigami Haptic Swatches: Design Methods for Cut-and-Fold Haptic Feedback Mechanisms (ACM CHI 2020)
Kirigami Haptic Swatches demonstrate how kirigami and origami based structures enable sophisticated haptic feedback through simple cut-and-fold fabrication techniques. We leverage four types of geometric patterns: rotational erection system (RES), split-fold waterbomb (SFWB), the overlaid structure of SFWB and RES (SFWB+RES), and cylindrical origami, to render different sets of haptic feedback (i.e. linear, bistable, bouncing snap-through, and rotational force behaviors, respectively). In each structure, not only the form factor but also the force feedback properties can be tuned through geometric parameters. We experimentally analyzed and modeled the structures, and implemented software to automatically generate 2D patterns for desired haptic properties. We also demonstrate five example applications including an assistive custom keyboard, rotational switch, multi-sensory toy, task checklist, and phone accessories. We believe the Kirigami Haptic Swatches helps tinkerers, designers, and even researchers to create interactions that enrich our haptic experience.
DOI
PDF
Video
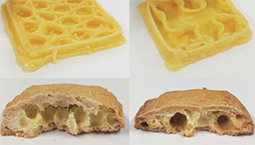
FoodFab: Creating Food Perception Illusions using Food 3D Printing
(ACM CHI 2020)
Food 3D printing enables the creation of customized food structures based on a person's individual needs. In this paper, we explore the use of food 3D printing to create perceptual illusions for controlling the level of perceived satiety given a defined amount of calories. We present FoodFab, a system that allows users to control their food intake through modifying a food's internal structure via two 3D printing parameters: infill pattern and infill density. In two experiments with a total of 30 participants, we studied the effect of these parameters on users' chewing time that is known to affect people's feeling of satiety. Our results show that we can indeed modify the chewing time by varying infill pattern and density, and thus control perceived satiety. Based on the results, we propose two computational models and integrate them into a user interface that simplifies the creation of personalized food structures.
DOI
PDF
Video
Page
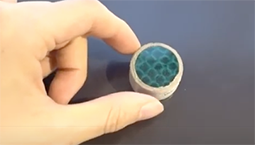
MagneLayer: Force Field Fabrication by Layered Magnetic Sheets. (ACM CHI 2020)
Magnets are very useful for the rapid prototyping of haptic interactions. However, it is difficult to arrange fine and complex magnetic fields rapidly. Therefore, we invented a method for fabricating complex geometric magnetic patterns by overlaying multiple magnetic rubber sheets. This method resolves the tradeoff between magnetized pattern complexity and the time required for magnetization. By layering multiple magnetic sheets that have simple magnetic patterns, various types of geometric magnetic patterns, such as checkered and diamond ones, can be generated on the top surface. By applying superposed magnetic fields, various types of tactile stimuli and haptic interaction can be created rapidly. Furthermore, the superposed magnetic fields can be changed dynamically by rotating the layered magnetic sheets. In this paper, we clarify the material requirements and describe the design method for creating these geometric magnetic patterns. We also demonstrate several of their applications.
DOI
PDF
Video
Page
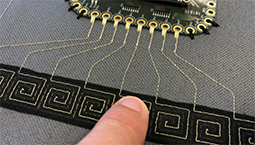
Embroidered Resistive Pressure Sensors: A Novel Approach for Textile Interfaces (ACM CHI 2020)
We present a novel method for augmenting arbitrary fabrics with textile-based pressure sensors using an off-the-shelf embroidery machine. We apply resistive textiles and conductive yarns on top of a base fabric, to yield a flexible and versatile continuous sensing device, which is based on the widespread principle of force sensitive resistors. The patches can easily be attached to measurement and/or computing devices, e.g. for controlling accessories. In this paper, we investigate the impacts of related design and fabrication parameters, introduce five different pattern designs, and discuss their pros and cons. We present crucial insights and recommendations for design and manufacturing of embroidered pressure sensors. Our sensors show a very low activation threshold, as well as good dynamic range, signal-to-noise ratio, and part-to-part repeatability.
DOI
PDF
Video
Page

PolySense: Augmenting Textiles with Electrical
Functionality using In-Situ Polymerization (ACM CHI 2020)
We present a method for enabling arbitrary textiles to sense pressure and deformation: In-situ polymerization supports integration of piezoresistive properties at the material level, preserving a textile’s haptic and mechanical characteristics. We demonstrate how to enhance a wide set of fabrics and yarns using only readily available tools. To further support customisation by the designer, we present methods for patterning, as needed to create circuits and sensors, and demonstrate how to combine areas of different conductance in one material. Technical evaluation results demonstrate the performance of sensors created using our method is comparable to off-the-shelf piezoresistive textiles. As application examples,we demonstrate rapid manufacturing of on-body interfaces, tie-dyed motion-capture clothing, and zippers that act as potentiometers.
DOI
PDF
Video
Page
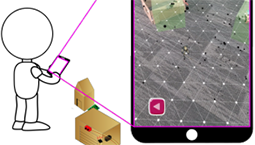
StoryMakAR: Bringing Stories to Life with an Augmented Reality & Physical Prototyping Toolkit for Youth (ACM CHI 2020)
Makerspaces can support educational experiences in prototyping for children. Storytelling platforms enable high levels of creativity and expression, but have high barriers of entry. We introduce StoryMakAR, which combines making and storytelling. StoryMakAR is a new AR-IoT system for children that uses block programming, physical prototyping, and event-based storytelling to bring stories to life. We reduce the barriers to entry for youth (Age=14-18) by designing an accessible, plug-and-play system through merging both electro-mechanical devices and virtual characters to create stories. We describe our initial design process, the evolution and workflow of StoryMakAR, and results from multiple single-session workshops with 33 high school students. Our preliminary studies led us to understand what students want to make. We provide evidence of how students both engage and have difficulties with maker-based storytelling.
DOI
PDF
Video

Rapid Iron-On User Interfaces: Hands-on Fabrication of Interactive Textile Prototypes (ACM CHI 2020)
Rapid prototyping of interactive textiles is still challenging, since manual skills, several processing steps, and expert knowledge are involved. We present Rapid Iron-On User Interfaces, a novel fabrication approach for empowering designers and makers to enhance fabrics with interactive functionalities. It builds on heat-activated adhesive materials consisting of smart textiles and printed electronics, which can be flexibly ironed onto the fabric to create custom interface functionality. To support rapid fabrication in a sketching-like fashion, we developed a handheld dispenser tool for directly applying continuous functional tapes of desired length as well as discrete patches. We introduce versatile compositions techniques that allow for creating complex circuits, utilizing commodity textile accessories and sketching custom-shaped I/O modules. We further contribute a comprehensive library of components for input, output, wiring and computing.
DOI
PDF
Video
Page
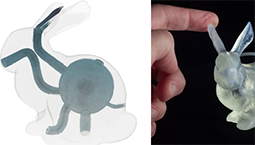
AirTouch: 3D-Printed Touch-Sensitive Objects Using Pneumatic Sensing (ACM CHI 2020)
3D printing technology can be used to rapidly prototype the look and feel of 3D objects. However, the objects produced are passive. There has been increasing interest in making these objects interactive, yet they often require assembling components or complex calibration. In this paper, we contribute AirTouch, a technique that enables designers to fabricate touch-sensitive objects with minimal assembly and calibration using pneumatic sensing. AirTouch-enabled objects are 3D printed as a single structure using a consumer-level 3D printer. AirTouch uses pre-trained machine learning models to identify interactions with fabricated objects, meaning that there is no calibration required once the object has completed printing. We evaluate our technique using fabricated objects with various geometries and touch sensitive locations, obtaining accuracies of at least 90% with 12 interactive locations.
DOI
PDF
Video

PhysioSkin: Rapid Fabrication of Skin-Conformal Physiological Interfaces
(ACM CHI 2020)
Advances in rapid prototyping platforms have made physiological sensing accessible to a wide audience. However, off-the-shelf electrodes commonly used for capturing biosignals are typically thick, non-conformal and do not support customization. We present PhysioSkin, a rapid, do-it-yourself prototyping method for fabricating custom multi-modal physiological sensors, using commercial materials and a commodity desktop inkjet printer. It realizes ultrathin skin-conformal patches (~1μm) and interactive textiles that capture sEMG, EDA and ECG signals. It further supports fabricating devices with custom levels of thickness and stretchability. We present detailed fabrication explorations on multiple substrate materials, functional inks and skin adhesive materials. Informed from the literature, we also provide design recommendations for each of the modalities. Evaluation results show that the sensor patches achieve a high signal-to-noise ratio.
DOI
PDF
Video

Mix&Match: Towards Omitting Modelling through In-Situ Alteration and Remixing of Model Repository Artifacts in Mixed Reality (ACM CHI 2020)
The accessibility of tools to model artifacts is one of the core driving factors for the adoption of Personal Fabrication. Subsequently, model repositories like Thingiverse became important tools in (novice) makers' processes. They allow them to shorten or even omit the design process, offloading a majority of the effort to other parties. However, steps like measurement of surrounding constraints (e.g., clearance) which exist only inside the users' environment, can not be similarly outsourced. We propose Mix&Match a mixed-reality-based system which allows users to browse model repositories, preview the models in-situ, and adapt them to their environment in a simple and immediate fashion. Mix&Match aims to provide users with CSG operations which can be based on both virtual and real geometry. We present interaction patterns and scenarios for Mix&Match, arguing for the combination of mixed reality and model repositories. This enables almost modelling-free personal fabrication for both novices and expert makers.
DOI
PDF
Video
Page
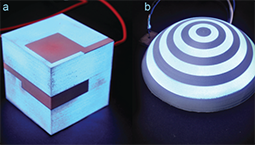
ProtoSpray: Combining 3D Printing and Spraying to Create Interactive Displays with Arbitrary Shapes
(ACM CHI 2020)
ProtoSpray is a new fabrication method that combines 3D printing and spray coating, to create touch-sensitive displays of arbitrary shape. Our approach makes novel use of 3D printed conductive channels to create base electrodes and shape displays. A channelled 3D printed object is then combined with spraying active, electroluminescent, materials to produce illumination. This demonstration involves multiple different devices, created through the ProtoSpray process, showing its free-form applicability to irregular shapes such as a mobius strip and spherical surfaces. Our work provides a platform to empower makers with displays as a fabrication material.
DOI
PDF
Video
TangibleCircuits: An Interactive 3D Printed Circuit Education Tool for People with Visual Impairments (ACM CHI 2020)
We present a novel haptic and audio feedback device that allows blind and visually impaired (BVI) users to understand circuit diagrams. TangibleCircuits allows users to interact with a 3D printed tangible model of a circuit which provides audio tutorial directions while being touched. Our system comprises an automated parsing algorithm which extracts 3D printable models as well as an audio interfaces from a Fritzing diagram. To better understand the requirements of designing technology to assist BVI users in learning hardware computing, we conducted a series of formative inquiries into the accessibility limitations of current circuit tutorial technologies. In addition, we derived insights and design considerations gleaned from conducting a formal comparative user study to understand the effectiveness of TangibleCircuits as a tutorial system.
DOI
PDF
Video
Page
Jubilee: An Extensible Machine for Multi-tool Fabrication (ACM CHI 2020)
We present Jubilee, an open-source hardware machine with automatic tool-changing and interchangeable bed plates. As digital fabrication tools have become more broadly accessible, tailoring those machines to new users and novel workflows has become central to HCI research. However, the lack of hardware infrastructure makes custom application development cumbersome. We identify a need for an extensible platform to allow HCI researchers to develop workflows for fabrication, material exploration, and other applications. Jubilee addresses this need. It can automatically and repeatably change tools in the same operation. It can be built with a combination of simple 3D-printed and readily available parts. It has several standard head designs for a variety of applications including 3D printing, syringe-based liquid handling, imaging, and plotting. We present Jubilee with a comprehensive set of assembly instructions and kinematic mount templates for user-designed tools and bed plates. Finally we demonstrate Jubilee's multi-tool workflow functionality with a series of example applications.
DOI
PDF
Video
Page
Unfabricate: Designing Smart Textiles for Disassembly (ACM CHI 2020)
Smart textiles development is combining computing and textile technologies to create tactile, functional objects such as smart garments, soft medical devices, and space suits. However, the field also combines the massive waste streams of both the digital electronics and textiles industries. The following work explores how HCI researchers might be poised to address sustainability and waste in future smart textiles development through interventions at design time. Specifically, we perform a design inquiry into techniques and practices for reclaiming and reusing smart textiles materials and explore how such techniques can be integrated into smart textiles design tools. Beginning with a practice in sustainable or "slow" fashion, unravelling a garment into yarn, the suite of explorations titled "Unfabricate" probes values of time and labor in crafting a garment; speculates how a smart textile garment may be designed with reuse in mind; and imagines how electronic and textile components may be given new life in novel uses.
DOI
PDF
Fabricatable Machines: A Toolkit for Building Digital Fabrication Machines (ACM TEI 2020)
Digital fabrication is changing the way we design and manufacture the objects around us. Digital fabrication machines enable mass-customisation. However, customising the machines themselves requires a high amount of expertise, which prevents even advanced users from taking part in the creation of bespoke fabrication tools. We present Fabricatable Machines, an open-source toolkit for designing custom fabrication machines. We designed a linear motion module, The Fabricatable Axis, that provides robust automated linear motion. The Fabricatable Axis can be resized, adjusted, and fabricated from different materials. Users can build machines by combining multiple axes. We optimised the design of the axis to be manufactured using a CNC mill, with few externally sourced parts. We observed users creating machines including portable milling machines, 3D printers, and pipe inspection robots using the Fabricatable Machines Toolkit.
DOI
PDF

ForceStamps: Fiducial Markers for Pressure-sensitive Touch Surfaces to Support Rapid Prototyping of Physical Control Interfaces (ACM TEI 2020)
We present ForceStamps, fiducial markers for supporting rapid prototyping of physical control interfaces on pressure-sensitive touch surfaces. We investigate marker design options for supporting various physical controls, with focusing on creating dedicated footprints and maintaining the structural stability. ForceStamps can be persistently tracked on surfaces along with the force information and other attributes. Designers without knowledge of electronics can rapidly prototype physical controls by attaching mechanisms to ForceStamps, while manipulating the haptic feedback with buffer materials. The created control widgets can be spatially configured on the touch surface to make an interface layout. We showcase a variety of example controls created with ForceStamps. In addition, we report on our analysis of a two-day musical instrument design workshop to explore the affordances of ForceStamps for making novel instruments with diverse interaction designs.
DOI
PDF
Video
Page

Foxels: Build Your Own Smart Furniture (ACM TEI 2020)
Introducing interactive components into furniture has proven difficult due to the different lifespans of furniture and digital devices. We present Foxels, a modular, smart furniture concept that allows users to create their own interactive furniture on demand by simply snapping together individual building blocks. The modular design makes the system flexible to accommodate a variety of interactive furniture setups, making it particularly well-suited for re-configurable spaces. Considering the trade-off between ease-of-use and high versatility, we explored a number of interaction methods that can be applied to modular interactive furniture, thereby extending the well-known tangible programming paradigm. After explaining our implementation, we demonstrate the validity of the proposed concepts by presenting how Foxels can be used in an ideation workshop along with many additional real-world examples.
DOI
PDF
Video
Page
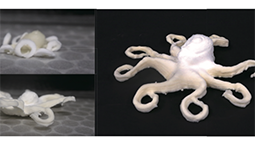
ExpandFab: Fabricating Objects Expanding and Changing Shape with Heat (ACM TEI 2020)
ExpandFab is a fabrication method for creating expanding objects using foam materials. The printed objects change their shape and volume, which is advantageous for reducing the printing time and transportation costs. For the fabrication of expanding objects, we investigated a basic principle of the expansion rate and developed materials by mixing a foam powder and elastic adhesive. Furthermore, we developed a fabrication method using the foam materials. A user can design expanded objects using our design software and sets the expansion areas on the surface. The software simulates and exports the 3d model into a three-dimensional (3D) printer. The 3D printer prints the expandable object by curing with ultraviolet light. Finally, the user heats the printed objects, and the objects expand to maximum approximately 2.7 times of their original size. ExpandFab allows users to prototype products that expand and morph into various shapes, such as objects changing from one shape to various shapes, and functional prototype with electronic components.
DOI
PDF
Video
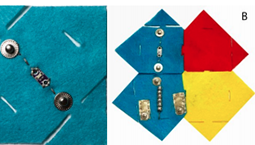
Wearable Bits: Scaffolding Creativity with a Prototyping Toolkit for Wearable E-textiles (ACM TEI 2020)
Smart garment and wearable e-textile prototypes are difficult to co-design because of the variety of expertise needed (garment design, sewing skills, hardware prototyping, and software programming). To help with this, we developed a toolkit for prototyping wearable e-textiles, named Wearable Bits, which enables co-design with non-expert users without demanding sewing, hardware or software skills. We developed a low-fidelity and medium-fidelity experience prototype of the toolkit and ran a series of workshops where non-expert users designed their own e-textile wearables using Wearable Bits. In this paper, we discuss the ideas they developed, their construction techniques, the roles individuals took on while building, and suggestions for future toolkits.
DOI
PDF
Page
2019
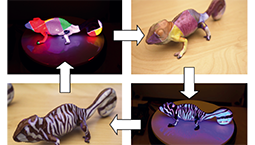
Photo-Chromeleon: Re-Programmable Multi-Color Textures Using Photochromic Dyes (ACM UIST 2019)
In this paper, we present a method to create re-programmable multi-color textures that are made from a single material only. The key idea builds on the use of photochromic inks that can switch their appearance from transparent to colored when exposed to light of a certain wavelength. By mixing cyan, magenta, and yellow (CMY) photochromic dyes into a single solution and leveraging the different absorption spectra of each dye, we can control each color channel in the solution separately. Our approach can transform single-material fabrication techniques, such as coating, into high-resolution multi-color processes. We discuss the material mixing procedure, modifications to the light source, and the algorithm to control each color channel. We then show the results from an experiment in which we evaluated the available color space and the resolution of our textures. Finally, we demonstrate our user interface that allows users to transfer virtual textures onto physical objects and show a range of application examples.
DOI
PDF
Video
Page

KnitPicking Textures: Programming and Modifying Complex Knitted Textures for Machine and Hand Knitting (ACM UIST 2019)
Knitting creates complex, soft fabrics with unique texture properties that can be used to create interactive objects. However, little work addresses the challenges of designing and using knitted textures computationally. We present KnitPick: a pipeline for interpreting hand-knitting texture patterns into KnitGraphs which can be output to machine and hand-knitting instructions. Using KnitPick, we contribute a measured and photographed data set of 302 knitted textures. Based on findings from this data set, we contribute two algorithms for manipulating KnitGraphs. KnitCarving shapes a graph while respecting a texture, and KnitPatching combines graphs with disparate textures while maintaining a consistent shape. KnitPick is the first system to bridge the gap between hand- and machine-knitting when creating complex knitted textures.
DOI
PDF
Video
Page

SensorSnaps: Integrating Wireless Sensor Nodes into Fabric Snap Fasteners for Textile Interfaces (ACM UIST 2019)
Adding electronics to textiles can be time-consuming and requires technical expertise. We introduce SensorSnaps, low-power wireless sensor nodes that seamlessly integrate into caps of fabric snap fasteners. SensorSnaps provide a new technique to quickly and intuitively augment any location on the clothing with sensing capabilities. SensorSnaps securely attach and detach from ubiquitous commercial snap fasteners. Using inertial measurement units, the SensorSnaps detect tap and rotation gestures, as well as track body motion. We optimized the power consumption for SensorSnaps to work continuously for 45 minutes and up to 4 hours in capacitive touch standby mode. We present applications in which the SensorSnaps are used as gestural interfaces for a music player controller, cursor control, and motion tracking suit. The user study showed that SensorSnap could be attached in around 71 seconds, similar to attaching off-the-shelf snaps, and participants found the gestures easy to learn and perform. SensorSnaps could allow anyone to effortlessly add sophisticated sensing capacities to ubiquitous snap fasteners.
DOI
PDF
Video
Page
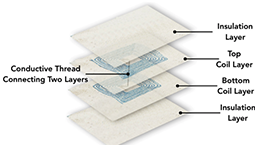
Tessutivo: Contextual Interactions on Interactive Fabrics with Inductive Sensing (ACM UIST 2019)
We present Tessutivo, a contact-based inductive sensing technique for contextual interactions on interactive fabrics. Our technique recognizes conductive objects (mainly metallic) that are commonly found in households and workplaces, such as keys, coins, and electronic devices. We built a prototype containing six by six spiral-shaped coils made of conductive thread, sewn onto a four-layer fabric structure. We carefully designed the coil shape parameters to maximize the sensitivity based on a new inductance approximation formula. Through a ten-participant study, we evaluated the performance of our proposed sensing technique across 27 common objects.
DOI
Video
Page
3D Printed Fabric: Techniques for Design and 3D Weaving Programmable Textiles (ACM UIST 2019)
We present a technique for fabricating soft and flexible textiles using a consumer grade fused deposition modeling (FDM) 3D printer. By controlling the movement of the print header, the FDM alternately weaves the stringing fibers across a row of pillars. Owing to the structure of the fibers, which supports and strengthens the pillars from each side, a 3D printer can print a thin sheet of fabric in an upright position while the fibers are being woven. In addition, this technique enables users to employ materials with various colors and/or properties when designing a pattern, and to prototype an interactive object using a variety of off-the-shelf materials such as a conductive filament. We also describe a technique for weaving textiles and introduce a list of parameters that enable users to design their own textile variations.
DOI
PDF
Video
Page

Knitting Skeletons: A Computer-Aided Design Tool for Shaping and Patterning of Knitted Garments (ACM UIST 2019)
This work presents a novel interactive system for simple garment composition and surface patterning. Our approach makes it easier for casual users to customize machine-knitted garments, while enabling more advanced users to design their own composable templates. Our tool combines ideas from CAD software and image editing: it allows the composition of (1) parametric knitted primitives, and (2) stitch pattern layers with different resampling behaviours. By leveraging the regularity of our primitives, our tool enables interactive customization with automated layout and real-time patterning feedback. We show a variety of garments and patterns created with our tool, and highlight our ability to transfer shape and pattern customizations between users.
DOI
PDF
Video
Page

Self-healing UI: Mechanically and Electrically Self-healing Materials for Sensing and Actuation Interfaces (ACM UIST 2019)
Living things in nature have long been utilizing the ability to "heal" their wounds on the soft bodies to survive in the outer environment. In order to impart this self-healing property to our daily life interface, we propose Self-healing UI, a soft-bodied interface that can intrinsically self-heal damages without external stimuli or glue. The key material to achieving Self-healing UI is MWCNTs-PBS, a composite material of a self-healing polymer polyborosiloxane (PBS) and a filler material multi-walled carbon nanotubes (MWCNTs), which retains mechanical and electrical self-healability. We developed a hybrid model that combines PBS, MWCNTs-PBS, and other common soft materials including fabric and silicone to build interface devices with self-healing, sensing, and actuation capability. These devices were implemented by layer-by-layer stacking fabrication without glue or any post-processing, by leveraging the materials' inherent self-healing property between two layers. We then demonstrated sensing primitives and interactive applications that extend the design space of shape-changing interfaces with their ability to transform, conform, reconfigure, heal, and fuse, which we believe can enrich the toolbox of human-computer interaction (HCI).
DOI
Video
Page

Skin-On Interfaces: A Bio-Driven Approach for Artificial Skin Design to Cover Interactive Devices (ACM UIST 2019)
We propose a paradigm called Skin-On interfaces, in which interactive devices have their own (artificial) skin, thus enabling new forms of input gestures for end-users (e.g. twist, scratch). Our work explores the design space of Skin-On interfaces by following a bio-driven approach: (1) From a sensory point of view, we study how to reproduce the look and feel of the human skin through three user studies; (2) From a gestural point of view, we explore how gestures naturally performed on skin can be transposed to Skin-On interfaces; (3) From a technical point of view, we explore and discuss different ways of fabricating interfaces that mimic human skin sensitivity and can recognize the gestures observed in the previous study; (4) We assemble the insights of our three exploratory facets to implement a series of Skin-On interfaces and we also contribute by providing a toolkit that enables easy reproduction and fabrication.
DOI
PDF
Video
Page

Morphlour: Personalized Flour-based Morphing Food Induced by Dehydration or Hydration Method (ACM UIST 2019)
In this paper, we explore personalized morphing food that enhances traditional food with new HCI capabilities, rather than replacing the chef and authentic ingredients (e.g. flour) with an autonomous machine and heterogeneous mixtures (e.g. gel). Thus, we contribute a unique transformation mechanism of kneaded and sheeted flour-based dough, with an integrated design strategy for morphing food during two general cooking methods: dehydration (e.g. baking) or hydration (e.g. water boiling). We also enrich the design space of morphing food by demonstrating several applications. We end by discussing hybrid cooking between human and a design tool that we developed to ensure accuracy while preserving customizability for morphing food.
DOI
Video
Page

Soft Inkjet Circuits: Rapid Multi Material Fabrication of Soft Circuits Using a Commodity Inkjet Printer (ACM UIST 2019)
Despite the increasing popularity of soft interactive devices, their fabrication remains complex and time consuming. We contribute a process for rapid do-it-yourself fabrication of soft circuits using a conventional desktop inkjet printer. It supports inkjet printing of circuits that are stretchable, ultrathin, high resolution, and integrated with a wide variety of materials used for prototyping. We introduce multi-ink functional printing on a desktop printer for realizing multi-material devices, including conductive and isolating inks. We further present DIY techniques to enhance compatibility between inks and substrates and the circuits' elasticity. This enables circuits on a wide set of materials including temporary tattoo paper, textiles, and thermoplastic. Four application cases demonstrate versatile uses for realizing stretchable devices, e-textiles, body-based and re-shapeable interfaces.
DOI
PDF
Video
Page

ShapeBots: Shape-changing Swarm Robots (ACM UIST 2019)
We introduce shape-changing swarm robots. A swarm of self-transformable robots can both individually and collectively change their configuration to display information, actuate objects, act as tangible controllers, visualize data, and provide physical affordances. ShapeBots is a concept prototype of shape-changing swarm robots. Each robot can change its shape by leveraging small linear actuators that are thin (2.5 cm) and highly extendable (up to 20cm) in both horizontal and vertical directions. The modular design of each actuator enables various shapes and geometries of self-transformation. We illustrate potential application scenarios and discuss how this type of interface opens up possibilities for the future of ubiquitous and distributed shape-changing interfaces.
DOI
PDF
Video
Page
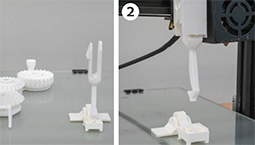
A 3D Printer Head as a Robotic Manipulator (ACM UIST 2019)
We introduce new ways of using a 3D printer head as a 3-axis robotic manipulator to enable advanced fabrication and usage such as assembling separately printed parts, breaking support materials and actuating printed objects on a build-plate. To achieve these manipulations, we customize a low-cost fused deposition modeling (FDM) 3D printer that can attach/detach printed end-effectors which change the function of the 3D printer head (e.g. grab, break, and rotate printed objects). These techniques afford the 3D printer to fabricate and assemble complete kinetic objects such as automatons without manual processing (i.e. removing support materials and assembling objects). We conclude that a small modification to a standard 3D printer, allows us to fabricate and assemble objects without human intervention.
DOI
Video
milliMorph -- Fluid-Driven Thin Film Shape-Change Materials for Interaction Design (ACM UIST 2019)
This paper presents a design space, a fabrication system and applications of creating fluidic chambers and channels at millimeter scale for tangible actuated interfaces. The ability to design and fabricate millifluidic chambers allows one to create high frequency actuation, sequential control of flows and high resolution design on thin film materials. We propose a four dimensional design space of creating these fluidic chambers, a novel heat sealing system that enables easy and precise millifluidics fabrication, and application demonstrations of the fabricated materials for haptics, ambient devices and robotics. As shape-change materials are increasingly integrated in designing novel interfaces, milliMorph enriches the library of fluid-driven shape-change materials, and demonstrates new design opportunities that is unique at millimeter scale for product and interaction design.
DOI
Video

Robiot: A Design Tool for Actuating Everyday Objects with Automatically Generated 3D Printable Mechanisms (ACM UIST 2019)
Users can now easily communicate digital information with an Internet of Things; in contrast, there remains a lack of support to automate physical tasks that involve legacy static objects, e.g. adjusting a desk lamp's angle for optimal brightness, turning on/off a manual faucet when washing dishes, sliding a window to maintain a preferred indoor temperature. Automating these simple physical tasks has the potential to improve people's quality of life, which is particularly important for people with a disability or in situational impairment. We present Robiot -- a design tool for generating mechanisms that can be attached to, motorized, and actuating legacy static objects to perform simple physical tasks. Users only need to take a short video manipulating an object to demonstrate an intended physical behavior. Robiot then extracts requisite parameters and automatically generates 3D models of the enabling actuation mechanisms by performing a scene and motion analysis of the 2D video in alignment with the object's 3D model. In an hour-long design session, six participants used Robiot to actuate seven everyday objects, imbuing them with the robotic capability to automate various physical tasks.
DOI
PDF
Video

StackMold: Rapid Prototyping of Functional Multi-Material Objects with Selective Levels of Surface Details (ACM UIST 2019)
We present StackMold, a DIY molding technique to prototype multi-material and multi-colored objects with embedded electronics. The key concept of our approach is a novel multi-stage mold buildup in which casting operations are interleaved with the assembly of the mold to form independent compartments for casting different materials. To build multi-stage molds, we contribute novel algorithms that computationally design and optimize the mold and casting procedure. By default, the multi-stage mold is fabricated in slices using a laser cutter. For regions that require more surface detail, a high-fidelity 3D-printed mold subsection can be incorporated. StackMold is an integrated end-to-end system, supporting all stages of the process: it provides a UI to specify material and detail regions of a 3D~object; it generates fabrication files for the molds; and it produces a step-by-step casting instruction manual.
DOI
Video

Turn-by-Wire: Computationally Mediated Physical Fabrication (ACM UIST 2019)
Advances in digital fabrication have simultaneously created new capabilities while reinforcing outdated workflows that constrain how, and by whom, these fabrication tools are used. In this paper, we investigate how a new class of hybrid-controlled machines can collaborate with novice and expert users alike to yield a more lucid making experience. We demonstrate these ideas through our system, Turn-by-Wire. By combining the capabilities of a traditional lathe with haptic input controllers that modulate both position and force, we detail a series of novel interaction metaphors that invite a more fluid making process spanning digital, model-centric, computer control, and embodied, adaptive, human control. We evaluate our system through a user study and discuss how these concepts generalize to other fabrication tools.
DOI
Video
Page

Tactlets: Adding Tactile Feedback to 3D Objects Using Custom Printed Controls (ACM UIST 2019)
Rapid prototyping of haptic output on 3D objects promises to enable a more widespread use of the tactile channel for ubiquitous, tangible, and wearable computing. Existing prototyping approaches, however, have limited tactile output capabilities, require advanced skills for design and fabrication, or are incompatible with curved object geometries. In this paper, we present a novel digital fabrication approach for printing custom, high-resolution controls for electro-tactile output with integrated touch sensing on interactive objects. It supports curved geometries of everyday objects. We contribute a design tool for modeling, testing, and refining tactile input and output at a high level of abstraction, based on parameterized electro-tactile controls.
DOI
PDF
Video
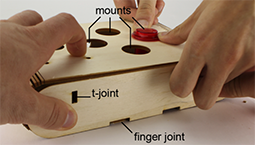
SpringFit: Joints and Mounts that Fabricate on Any Laser Cutter (ACM UIST 2019)
Joints are crucial to laser cutting as they allow making three-dimensional objects; mounts are crucial because they allow embedding technical components, such as motors. Unfortunately, mounts and joints tend to fail when trying to fabricate a model on a different laser cutter or from a different material. The reason for this lies in the way mounts and joints hold objects in place, which is by forc-ing them into slightly smaller openings. Such "press fit" mechanisms unfortunately are susceptible to the small changes in diameter that occur when switching to a ma-chine that removes more or less material ("kerf"), as well as to changes in stiffness, as they occur when switching to a different material. We present a software tool called springFit that resolves this problem by replacing the problematic press fit-based mounts and joints with what we call canti¬lever-based mounts and joints.
DOI
PDF
Video
Page
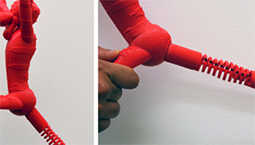
Ondulé: Designing and Controlling 3D Printable Springs (ACM UIST 2019)
We present Ondulé-an interactive design tool that allows novices to create parameterizable deformation behaviors in 3D-printable models using helical springs and embedded joints. Informed by spring theory and our empirical mechanical experiments, we introduce spring and joint-based design techniques that support a range of parameterizable deformation behaviors, including compress, extend, twist, bend, and various combinations. To enable users to design and add these deformations to their models, we introduce a custom design tool for Rhino. Here, users can convert selected geometries into springs, customize spring stiffness, and parameterize their design with mechanical constraints for desired behaviors.
DOI
PDF
Video
Page

Human-in-the-loop Fabrication of 3D Structures with Natural Tree Branches (ACM SCF 2019)
We propose a design and fabrication system leveraging the diverse shapes of natural wood. With our system, precise geometries are fabricated from non-standardized, naturally curved branches. In this way, low-valued tree branches are up-cycled to a construction material. The process is implemented as follows. Taking a set of branches and a user-defined parametric target surface, the system makes a reciprocal pattern of curves that lie on the surface. Then, it automatically matches the shapes of the scanned branches with these curves. There was a similar attempt to build a large beam structure from tree trunks using industrial equipment such as cranes and robot arms. In contrast, we target smaller surface structures from tree branches using more accessible tools (2.5D CNC) with human-in-the-loop operation. We ask the user to manually place a branch to a defined orientation with the help of audio-visual guidance.
DOI
PDF
Video

Exploring Mechanical Meta-Material Structures through Personalized Shoe Sole Design (ACM SCF 2019)
Mechanical meta-material structures (MMS) are designed structures with mechanical properties not found in ordinary materials. MMS can now be created far more easily using digital manufacturing. We explore how different MMS can be combined, through the design of a shoe sole. Thereby showing the potential of using MMS to create personalized and sustainable footwear. We analysed the phenomenon of foot deformation and mapped different structures with different behaviours to meet the needs of different feet. Consequently, a shoe sole was generated by an algorithm and 3D printed in one single material with multiple properties (e.g. stiff and soft) and responsive behaviour, making it easy to recycle. We report the design phases which required using six types of software.
DOI
Video
Page

Automated Reconstruction of Smoothly Joining 3D Printed Restorations to Fix Broken Objects (ACM SCF 2019)
In this work, we provide an approach to automatically reconstruct a 3D printed restoration piece for a broken object from 3D scanned meshes of the broken object and an original counterpart. Our approach provides two contributions to reconstruct a restoration with a smooth join to the broken object, necessary for object functionality such as liquid containment, injury prevention, and visual aesthetic. As our first contribution, we leverage the original counterpart mesh to grow an exterior surface for the restoration piece that approaches the broken object within a small tolerance. As our second contribution, we project the exterior surface boundary onto the broken object to create a fracture surface boundary whose vertices satisfy the constraints of proximity, normal alignment, and tangency to vertices on the exterior surface boundary.
DOI
PDF
Video
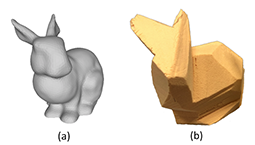
Rough Carving of 3D Models with Spatial Augmented Reality (ACM SCF 2019)
Carving is a subtractive process where we get the shape by removing materials. While most people can get roughly the right intended shape, it is usually challenging not to over-cut the model. We propose a method that helps an unskilled user to carve a rough physical replica of a 3D model using the minimum number of cuts while only using manual cutting tools. The method starts by analyzing the input 3D model and generates the minimum set of cutting steps that remove most of the material. Then using a projector, we project the instructions sequentially onto a block of material to guide the user in performing them. We use the projector-camera setup to 3D scan the object after cutting and automatically detect the changes to reflect them on the digital model. We demonstrate a complete system to support this operation and show several examples of manually carved 3D models while using the system.
DOI
Video

Echidna: Mixed-domain Computational Implementation via Decision Trees (ACM SCF 2019)
Custom mechatronic devices offer personalized functionality, but also come with many non-functional requirements that are unfamiliar to those inexperienced with electronics such as current draw and servo power. The Echidna prototype system enables non-electrical engineers to move from conception to implementation with their mechatronic ideas by generating and searching through a design space that automatically fills in supporting requirements, such as PCB placement and wiring, around their functional specification. The space is modeled as a decision tree whose root is the user's list of lights, motors, sensors, and other functional components that need to be connected, powered, and controlled. Once found, a complete and valid design can be used to synthesize geometry for 3D printing, circuits, and firmware resulting in a set of "plug and fabricate" files for creating their device. We demonstrate how Echidna realizes several designs and discuss how it can be further customized to task-specific applications.
DOI
Video
Page
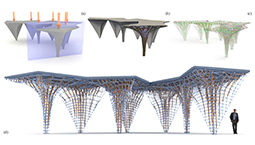
Volumetric Michell Trusses for Parametric Design & Fabrication (ACM SCF 2019)
We present the first algorithm for designing volumetric Michell Trusses. Our method uses a parametrization-based approach to generate trusses made of structural elements aligned with the primary direction of an object's stress field. Such trusses exhibit high strength-to-weight ratio while also being parametrically editable which can be easily integrated with parametric editing tools such as Autodesk Fusion. We show a number of examples that demonstrate that the output of our algorithm produces truss structures that are aligned with an object's underlying stress tensor field, are structurally sound and that their global parametrization facilitates the creation of unique structures in a number of domains.
DOI
PDF
Video
Page
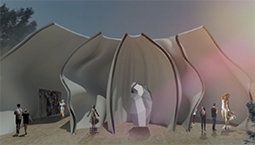
A Method to Evaluate the Formability and Fluidity of Materials for 3D Printing (ACM SCF 2019)
Use of 3D printers for construction brings a new possibility of creating walls with shapes that were not possible with conventional construction methods. However, existing construction materials can not be used for 3D printing as they are, and the exploration for new materials is the key to the realization of this concept. Formability and fluidity are the key factors in evaluating whether or not materials are suitable for 3D printing, including use within the field of architecture. A standardized quantitative method to evaluate construction materials is required for the comparison between materials for various projects. For example, the concrete slump test is one of the universal standards that is used to evaluate the quality and suitability for a specific construction method. In the emerging field of construction with 3D printing, however, a standardized method is yet to be established. This paper proposes an efficient method to evaluate the formability and fluidity of concrete-based materials, while only using simple instruments. The proposed method and instruments were tested by evaluating geo-polymer-based concretes, which are relatively difficult to evaluate due to its high intrinsic viscosity.
DOI
Video
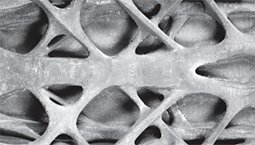
3D-Printed Formwork for Bespoke Concrete Stairs: From Computational Design to Digital Fabricati (ACM SCF 2019)
Non-standard stairs have an important role in architecture, but their complex details and three-dimensionality pose significant fabrication challenges. One of the preferred materials for custom stairs is concrete, which can be cast in complex shapes, the only limitation in this case being the fabrication of the necessary formworks. This paper reviews the opportunities and challenges of using 3D-printed formwork for fabricating custom concrete stairs with complex geometries. 3D printing can unlock an entirely new vocabulary of shapes for concrete structures, previously unavailable with traditional formwork systems. Only a minimal amount of 3D-printed plastic is required to deliver a very thin, stable shell. With these formworks, complex topologies can be achieved in concrete elements. Such elements can optimize the structural performance or improve functional aspects, as well as introduce a radically different aesthetic.
DOI
Video
Page
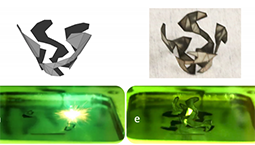
Computational Laser Forming Origami of Convex Surfaces (ACM SCF 2019)
Laser forming is a fabrication method that uses laser to fold sheets into 3D structures. To overcome the limitations in the traditional practice that relies on tedious manual design, this paper advances laser forming by developing computational methods that procedurally convert a polyhedron P into laser formable 2D patterns and folding instructions or report that P is not laser formable. Due to the limitation of the low-cost laser cutter considered in this paper, we will focus our discussion on laser forming convex surfaces. A 3D surface is called convex if the entire surface lies on the boundary of its convex hull.
DOI
PDF
Video
Page
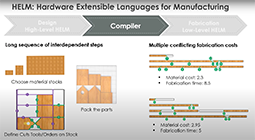
Carpentry compiler (ACM Transactions on Graphics 2019)
Traditional manufacturing workflows strongly decouple design and fabrication phases. As a result, fabrication-related objectives such as
manufacturing time and precision are difficult to optimize in the design space, and vice versa. This paper presents HL-HELM, a high-level,
domain-specific language for expressing abstract, parametric fabrication plans; it also introduces LL-HELM, a low-level language for
expressing concrete fabrication plans that take into account the physical constraints of available manufacturing processes.
We present a new compiler that supports the real-time, unoptimized translation of high-level, geometric fabrication operations into concrete,
tool-specific fabrication instructions; this gives users immediate feedback on the physical feasibility of plans as they design them.
HELM offers novel optimizations to improve accuracy and reduce fabrication time as well as material costs. Finally, optimized low-level
plans can be interpreted as step-by-step instructions for users to actually fabricate a physical product. We provide a variety of example
fabrication plans in the carpentry domain that are designed using our high-level language, show how the compiler translates and optimizes
these plans to generate concrete low-level instructions, and present the final physical products fabricated in wood.
DOI
PDF
Video
Page
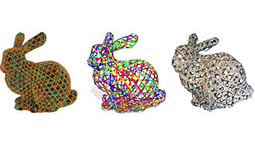
Weaving Geodesic Foliations (ACM SIGGRAPH 2019)
We study discrete geodesic foliations of surfaces---foliations whose leaves are all approximately geodesic curves---and develop several new variational algorithms for computing such foliations. Our key insight is a relaxation of vector field integrability in the discrete setting, which allows us to optimize for curl-free unit vector fields that remain well-defined near singularities and robustly recover a scalar function whose gradient is well aligned to these fields. We then connect the physics governing surfaces woven out of thin ribbons to the geometry of geodesic foliations, and present a design and fabrication pipeline for approximating surfaces of arbitrary geometry and topology by triaxially-woven structures, where the ribbon layout is determined by a geodesic foliation on a sixfold branched cover of the input surface. We validate the effectiveness of our pipeline on a variety of simulated and fabricated woven designs, including an example for readers to try at home.
DOI
PDF

Interactive Hand Pose Estimation Using A Stretch-Sensing Soft Glove (ACM SIGGRAPH 2019)
We propose a stretch-sensing soft glove to interactively capture hand poses with high accuracy and without requiring an external optical setup. We demonstrate how our device can be fabricated and calibrated at low cost, using simple tools available in most fabrication labs. To reconstruct the pose from the capacitive sensors embedded in the glove, we propose a deep network architecture that exploits the spatial layout of the sensor itself. The network is trained only once, using an inexpensive off-the-shelf hand pose reconstruction system to gather the training data. The per-user calibration is then performed on-the-fly using only the glove. The glove's capabilities are demonstrated in a series of ablative experiments, exploring different models and calibration methods. Comparing against commercial data gloves, we achieve a 35% improvement in reconstruction accuracy.
DOI
PDF
Video
Page
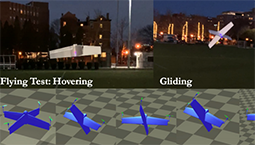
Learning To Fly: Computational Controller Design For Hybrid UAVs With Reinforcement Learning (ACM SIGGRAPH 2019)
Hybrid unmanned aerial vehicles (UAV) combine advantages of multicopters and fixed-wing planes: vertical take-off, landing, and low energy use. However, hybrid UAVs are rarely used because controller design is challenging due to its complex, mixed dynamics. In this paper, we propose a method to automate this design process by training a mode-free, model-agnostic neural network controller for hybrid UAVs. We present a neural network controller design with a novel error convolution input trained by reinforcement learning. Our controller exhibits two key features: First, it does not distinguish among flying modes, and the same controller structure can be used for copters with various dynamics. Second, our controller works for real models without any additional parameter tuning process, closing the gap between virtual simulation and real fabrication. We demonstrate the efficacy of the proposed controller both in simulation and in our custom-built hybrid UAVs. The experiments show that the controller is robust to exploit the complex dynamics when both rotors and wings are active in flight tests.
DOI
PDF
Video
Page
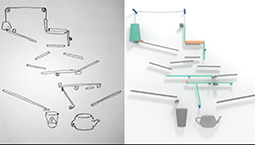
Designing Chain Reaction Contraptions from Causal Graphs (ACM SIGGRAPH 2019)
Chain reaction contraptions, commonly referred to as Rube Goldberg machines, achieve simple tasks in an intentionally complex fashion via a cascading sequence of events. They are fun, engaging and satisfying to watch. Physically realizing them, however, involves hours or even days of manual trial-and-error effort. The main difficulties lie in predicting failure factors over long chains of events and robustly enforcing an expected causality between parallel chains, especially under perturbations of the layout. We present a computational framework to help design the layout of such contraptions by optimizing their robustness to possible assembly errors.
DOI
PDF
Video
Page

Wallpaper Pattern Alignment along Garment Seams (ACM SIGGRAPH 2019)
Despite recent developments towards on-demand, individualized garment design and fabrication, the majority of processes in the fashion industry are still inefficient and heavily dependent on manual work. A significant amount of recent research in this area has been focused on supporting designers to digitally create sewing patterns and shapes, but there is little work on textured fabrics. Aligning textile patterns like stripes or plaid along garment seams requires an experienced tailor and is thus reserved only for expensive, high-end garments. We present an interactive algorithm for automatically aligning repetitive textile patterns along seams for a given garment, allowing a user to make design choices at each step of our pipeline. Our approach is based on the 17 wallpaper groups and the symmetries they exhibit.e desired objects. We showcase a range of examples made with our design tool, including objects with integrated sensors and display elements.
DOI
PDF
Video
Page

Visual Knitting Machine Programming (ACM SIGGRAPH 2019)
Industrial knitting machines are commonly used to manufacture complicated shapes from yarns; however, designing patterns for these machines requires extensive training. We present the first general visual programming interface for creating 3D objects with complex surface finishes on industrial knitting machines. At the core of our interface is a new, augmented, version of the stitch mesh data structure. The augmented stitch mesh stores low-level knitting operations per-face and encodes the dependencies between faces using directed edge labels. Our system can generate knittable augmented stitch meshes from 3D models, allows users to edit these meshes in a way that preserves their knittability, and can schedule the execution order and location of each face for production on a knitting machine. Our system is general, in that its knittability-preserving editing operations are sufficient to transform between any two machine-knittable stitch patterns with the same orientation on the same surface. We demonstrate the power and flexibility of our pipeline by using it to create and knit objects featuring a wide range of patterns and textures, including intarsia and Fair Isle colorwork; knit and purl textures; cable patterns; and laces.
DOI
PDF
Video
Page
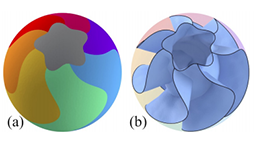
Surface2Volume: Surface Segmentation Conforming Assemblable Volumetric Partition (ACM SIGGRAPH 2019)
Users frequently seek to fabricate objects whose outer surfaces consist of regions with different surface attributes, such as color or material. Manufacturing such objects in a single piece is often challenging or even impossible. The alternative is to partition them into single-attribute volumetric parts that can be fabricated separately and then assembled to form the target object. Facilitating this approach requires partitioning the input model into parts that conform to the surface segmentation and that can be moved apart with no collisions. We propose Surface2Volume, a partition algorithm capable of producing such assemblable parts, each of which is affiliated with a single attribute, the outer surface of whose assembly conforms to the input surface geometry and segmentation. In computing the partition we strictly enforce conformity with surface segmentation and assemblability, and optimize for ease of fabrication by minimizing part count, promoting part simplicity, and simplifying assembly sequencing.
DOI
PDF
Page
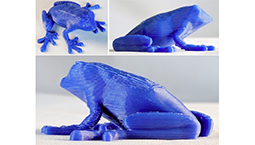
CurviSlicer: Slightly Curved Slicing for 3-Axis Printers (ACM SIGGRAPH 2019)
Most additive manufacturing processes fabricate objects by stacking planar layers of solidified material. As a result, produced parts exhibit a so-called staircase effect, which results from sampling slanted surfaces with parallel planes. Using thinner slices reduces this effect, but it always remains visible where layers almost align with the input surfaces.
In this research we exploit the ability of some additive manufacturing processes to deposit material slightly out of plane to dramatically reduce these artifacts. We focus in particular on the widespread Fused Filament Fabrication (FFF) technology, since most printers in this category can deposit along slightly curved paths, under deposition slope and thickness constraints.
DOI
PDF
Page
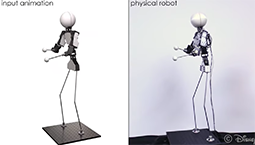
Vibration-Minimizing Motion Retargeting for Robotic Characters (ACM SIGGRAPH 2019)
Creating animations for robotic characters is very challenging due to the constraints imposed by their physical nature. In particular, the combination of fast motions and unavoidable structural deformations leads to mechanical oscillations that negatively affect their performances. Our goal is to automatically transfer motions created using traditional animation software to robotic characters while avoiding such artifacts. To this end, we develop an optimization-based, dynamics-aware motion retargeting system that adjusts an input motion such that visually salient low-frequency, large amplitude vibrations are suppressed. The technical core of our animation system consists of a differentiable dynamics simulator that provides constraint-based two-way coupling between rigid and flexible components. We demonstrate the efficacy of our method through experiments performed on a total of five robotic characters including a child-sized animatronic figure that features highly dynamic drumming and boxing motions.
DOI
PDF
Video
Page

Computational Design of Fabric Formwork (ACM SIGGRAPH 2019)
We present an inverse design tool for fabric formwork - a process where flat panels are sewn together to form a fabric container for casting a plaster sculpture. Compared to 3D printing techniques, the benefit of fabric formwork is its properties of low-cost and easy transport. The process of fabric formwork is akin to molding and casting but having a soft boundary. Deformation of the fabric container is governed by force equilibrium between the pressure forces from liquid fill and tension in the stretched fabric. The final result of fabrication depends on the shapes of the flat panels, the fabrication orientation and the placement of external supports. Our computational framework generates optimized flat panels and fabrication orientation with reference to a target shape, and determines effective locations for external supports. We demonstrate the function of this design tool on a variety of models with different shapes and topology. Physical fabrication is also demonstrated to validate our approach.
DOI
PDF
Video
Page

Volume-Aware Design of Composite Molds (ACM SIGGRAPH 2019)
We propose a novel technique for the automatic design of molds to cast highly complex shapes. The technique generates composite, two-piece molds. Each mold piece is made up of a hard plastic shell and a flexible silicone part. Thanks to the thin, soft, and smartly shaped silicone part, which is kept in place by a hard plastic shell, we can cast objects of unprecedented complexity. An innovative algorithm based on a volumetric analysis defines the layout of the internal cuts in the silicone mold part. Our approach can robustly handle thin protruding features and intertwined topologies that have caused previous methods to fail. We compare our results with state of the art techniques, and we demonstrate the casting of shapes with extremely complex geometry.
DOI
PDF
Video
Page
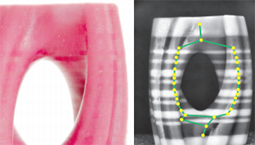
LayerCode: Optical Barcodes for 3D Printed Shapes (ACM SIGGRAPH 2019)
With the advance of personal and customized fabrication techniques, the capability to embed information in physical objects becomes evermore crucial. We present LayerCode, a tagging scheme that embeds a carefully designed barcode pattern in 3D printed objects as a deliberate byproduct of the 3D printing process. The LayerCode concept is inspired by the structural resemblance between the parallel black and white bars of the standard barcode and the universal layer-by-layer approach of 3D printing. We introduce an encoding algorithm that enables the 3D printing layers to carry information without altering the object geometry.
DOI
PDF
Video
Page
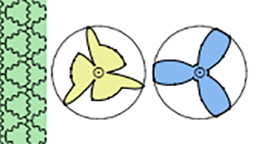
Star-Shaped Metrics for Mechanical Metamaterial Design (ACM SIGGRAPH 2019)
We present a method for designing mechanical metamaterials based on the novel concept of Voronoi diagrams induced by star-shaped metrics. As one of its central advantages, our approach supports interpolation between arbitrary metrics. This capability opens up a rich space of structures with interesting aesthetics and a wide range of mechanical properties, including isotropic, tetragonal, orthotropic, as well as smoothly graded materials. We evaluate our method by creating large sets of example structures, provided as accompanying material. We validate the mechanical properties predicted by simulation through tensile tests on a set of physical prototypes.
DOI
PDF
Page

SurfaceBrush: From Virtual Reality Drawings to Manifold Surfaces (ACM SIGGRAPH 2019)
Popular Virtual Reality (VR) tools allow users to draw varying-width, ribbonlike 3D brush strokes by moving a hand-held controller in 3D space. Artists frequently use dense collections of such strokes to draw virtual 3D shapes. We propose SurfaceBrush, a surfacing method that converts such VR drawings into user-intended manifold free-form 3D surfaces, providing a novel approach for modeling 3D shapes. The inputs to our method consist of dense collections of artist-drawn stroke ribbons described by the positions and normals of their central polylines, and ribbon widths. These inputs are highly distinct from those handled by existing surfacing frameworks and exhibit different sparsity and error patterns, necessitating a novel surfacing approach. We surface the input stroke drawings by identifying and leveraging local coherence between nearby artist strokes. In particular, we observe that strokes intended to be adjacent on the artist imagined surface often have similar tangent directions along their respective polylines. We leverage this local stroke direction consistency by casting the computation of the user-intended manifold surface as a constrained matching problem on stroke polyline vertices and edges.
DOI
PDF
Video
Page

FoldTronics: Creating 3D Objects with Integrated Electronics Using Foldable Honeycomb Structures (ACM CHI 2019)
We present FoldTronics, a 2D-cutting based fabrication technique to integrate electronics into 3D folded objects. The key idea is to cut and perforate a 2D sheet to make it foldable into a honeycomb structure using a cutting plotter; before folding the sheet into a 3D structure, users place the electronic components and circuitry onto the sheet. The fabrication process only takes a few minutes allowing to rapidly prototype functional interactive devices. The resulting objects are lightweight and rigid, thus allowing for weight-sensitive and force-sensitive applications. Finally, due to the nature of the honeycomb structure, the objects can be folded flat along one axis and thus can be efficiently transported in this compact form factor. We describe the structure of the foldable sheet, and present a design tool that enables users to quickly prototype the desired objects. We showcase a range of examples made with our design tool, including objects with integrated sensors and display elements.
DOI
PDF
Video
Page
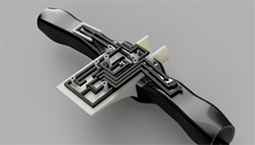
FiberWire: Embedding Electronic Function into 3D Printed Mechanically Strong, Lightweight Carbon Fiber Composite Objects (ACM CHI 2019)
3D printing offers significant potential in creating highly customized interactive and functional objects. However, at present ability to manufacture functional objects is limited by available materials (e.g., various polymers) and their process properties. For instance, many functional objects need stronger materials which may be satisfied with metal printers. However, to create wholly interactive devices, we need both conductors and insulators to create wiring, and electronic components to complete circuits. Unfortunately, the single material nature of metal printing, and its inherent high temperatures, preclude this. Thus, in 3D printed devices, we have had a choice of strong materials, or embedded interactivity, but not both. In this paper, we introduce a set of techniques we call FiberWire, which leverages a new commercially available capability to 3D print carbon fiber composite objects. These objects are light weight and mechanically strong, and our techniques demonstrate a means to embed circuitry for interactive devices within them.
DOI
PDF
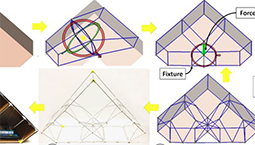
Shape Structuralizer: Design, Fabrication, and User-driven Iterative Refinement of 3D Mesh Models (ACM CHI 2019)
Current Computer-Aided Design (CAD) tools lack proper support for guiding novice users towards designs ready for Fabrication. We propose Shape Structuralizer (SS), an interactive design support system that repurposes surface models into structural constructions using rods and custom 3D-printed joints. Shape Structuralizer embeds a recommendation system that computationally supports the user during design ideation by providing design suggestions on local refinements of the design. This strategy enables novice users to choose designs that both satisfy stress constraints as well as their personal design intent.
DOI
PDF
Video
Page
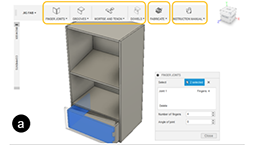
JigFab: Computational Fabrication of Constraints to Facilitate Woodworking with Power Tools (ACM CHI 2019)
We present JigFab, an integrated end-to-end system that supports casual makers in designing and Fabricating constructions with power tools. Starting from a digital version of the construction, JigFab achieves this by generating various types of constraints that configure and physically aid the movement of a power tool. Constraints are generated for every operation and are custom to the work piece. Constraints are laser cut and assembled together with predefined parts to reduce waste. JigFab's constraints are used according to an interactive step-by-step manual.
DOI
PDF
Video
Page
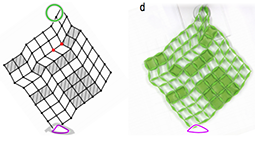
Understanding Metamaterial Mechanisms (ACM CHI 2019)
In this paper, we establish the underlying foundations of mechanisms that are composed of cell structures---known as metamaterial mechanisms. Such metamaterial mechanisms were previously shown to implement complete mechanisms in the cell structure of a 3D printed material, without the need for assembly. However, their design is highly challenging. A mechanism consists of many cells that are interconnected and impose constraints on each other. This leads to unobvious and non-linear behavior of the mechanism, which impedes user design. In this work, we investigate the underlying topological constraints of such cell structures and their influence on the resulting mechanism.
DOI
PDF
Video
Page

3D Pen + 3D Printer: Exploring the Role of Humans and Fabrication Machines in Creative Making (ACM CHI 2019)
The emergence of a 3D pen brings 3D modeling from a screen-based computer-aided design (CAD) system and 3D printing to direct and rapid crafting by 3D doodling. However, 3D doodling remains challenging, requiring craft skills to rapidly express an idea, which is critical in creative making. We explore a new process of 3D modeling using 3D pen + 3D printer. Our pilot study shows that users need support to reduce the number of non-creative tasks to explore a wide design strategy. With the opportunity to invent a new 3D modeling process that needs to incorporate both a pen and printer, we propose techniques and a system that empower users to print while doodling to focus on creative exploration.
DOI
Video
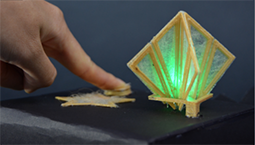
Desktop Electrospinning: A Single Extruder 3D Printer for Producing Rigid Plastic and Electrospun Textiles (ACM CHI 2019)
We present a new type of 3D printer that combines rigid plastic printing with melt electrospinning– a technique that uses electrostatic forces to create thin fibers from a molten polymer. Our printer enables custom-shaped textile sheets (similar in feel to wool felt) to be produced alongside rigid plastic using a single material (i.e., PLA) in a single process. We contribute open-source firmware, hardware specifications, and printing parameters to achieve melt electrospinning. Our approach offers new opportunities for fabricating interactive objects and sensors that blend the flexibility, absorbency and softness of produced electrospun textiles with the structure and rigidity of hard plastic for actuation, sensing, and tactile experiences.
DOI
PDF
Video
Page

Digital Fabrication of Soft Actuated Objects by Machine Knitting (ACM CHI 2019)
With recent interest in shape-changing interfaces, material-driven design, wearable technologies, and soft robotics, digital fabrication of soft actuatable material is increasingly in demand. Much of this research focuses on elastomers or non-stretchy air bladders. Computationally-controlled machine knitting offers an alternative fabrication technology which can rapidly produce soft textile objects that have a very different character: breathable, lightweight, and pleasant to the touch. These machines are well established and optimized for the mass production of garments, but compared to other digital fabrication techniques such as CNC machining or 3D printing, they have received much less attention as general purpose fabrication devices. In this work, we explore new ways to employ machine knitting for the creation of actuated soft objects. We describe the basic operation of this type of machine, then show new techniques for knitting tendon-based actuation into objects.
DOI
PDF
Video
Page

Kyub: A 3D Editor for Modeling Sturdy Laser-Cut Objects (ACM CHI 2019)
We present an interactive editing system for laser cutting called kyub. Kyub allows users to create models efficiently in 3D, which it then unfolds into the 2D plates laser cutters expect. Unlike earlier systems, such as FlatFitFab, kyub affords construction based on closed box structures, which allows users to turn very thin material, such as 4mm plywood, into objects capable of withstanding large forces, such as chairs users can actually sit on. To afford such sturdy construction, every kyub project begins with a simple finger-joint "boxel"—a structure we found to be capable of withstanding over 500kg of load. Users then extend their model by attaching additional boxels. Boxels merge automatically, resulting in larger, yet equally strong structures. While the concept of stacking boxels allows kyub to offer the strong affordance and ease of use of a voxel-based editor, boxels are not confined to a grid and readily combine with kuyb's various geometry deformation tools.
DOI
PDF
Video
Page
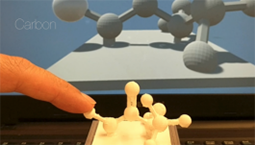
./trilaterate: A Fabrication Pipeline to Design and 3D Print Hover-, Touch-, and Force-Sensitive Objects (ACM CHI 2019)
Hover, touch, and force are promising input modalities that get increasingly integrated into screens and everyday objects. However, these interactions are often limited to flat surfaces and the integration of suitable sensors is time-consuming and costly. To alleviate these limitations, we contribute Trilaterate: A Fabrication pipeline to 3D print custom objects that detect the 3D position of a finger hovering, touching, or forcing them by combining multiple capacitance measurements via capacitive trilateration. Trilaterate places and routes actively-shielded sensors inside the object and operates on consumer-level 3D printers. We present technical evaluations and example applications that validate and demonstrate the wide applicability of Trilaterate.
DOI
PDF
Video
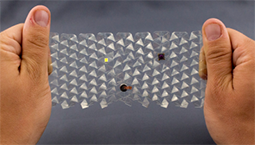
LASEC: Instant Fabrication of Stretchable Circuits Using a Laser Cutter (ACM CHI 2019)
This paper introduces LASEC, the first technique for instant do-it-yourself fabrication of circuits with custom stretchability on a conventional laser cutter and in a single pass. The approach is based on integrated cutting and ablation of a two-layer material using parametric design patterns. These patterns enable the designer to customize the desired stretchability of the circuit, to combine stretchable with non-stretchable areas, or to integrate areas of different stretchability. For adding circuits on such stretchable cut patterns, we contribute routing strategies and a real-time routing algorithm. An interactive design tool assists designers by automatically generating patterns and circuits from a high-level specification of the desired interface. The approach is compatible with off-the-shelf materials and can realize transparent interfaces. Several application examples demonstrate the versatility of the novel technique for applications in wearable computing, interactive textiles, and stretchable input devices.
DOI
PDF
Video

ElectroDermis: Fully Untethered, Stretchable, and Highly-Customizable Electronic Bandages (ACM CHI 2019)
Wearables have emerged as an increasingly promising interactive platform, imbuing the human body with always-available computational capabilities. This unlocks a wide range of applications, including discreet information access, health monitoring, fitness, and fashion. However, unlike previous platforms, wearable Electronics require structural conformity, must be comfortable for the wearer, and should be soft, elastic, and aesthetically appealing. We envision a future where Electronics can be temporarily attached to the body (like bandages or party masks), but in functional and aesthetically pleasing ways. Towards this vision, we introduce ElectroDermis, a fabrication approach that simplifies the creation of highly-functional and stretchable wearable Electronics that are conformal and fully untethered by discretizing rigid circuit boards into individual components.
DOI
Video
Page

VirtualComponent: A Mixed-Reality Tool for Designing and Tuning Breadboarded Circuits (ACM CHI 2019)
Prototyping electronic circuits is an increasingly popular activity, supported by researchers, who develop toolkits to improve the design, debugging, and fabrication of Electronics. Although past work mainly dealt with circuit topology, in this paper we propose a system for determining or tuning the values of the circuit components. Based on the results of a formative study with seventeen makers, we designed VirtualComponent, a mixed-reality tool that allows users to digitally place electronic components on a real breadboard, tune their values in software, and see these changes applied to the physical circuit in real-time.
DOI
Video
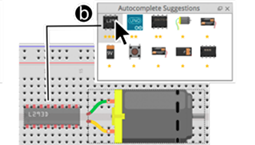
AutoFritz: Autocomplete for Prototyping Virtual Breadboard Circuits (ACM CHI 2019)
We propose autocomplete for the design and development of virtual breadboard circuits using software prototyping tools. With our system, a user inserts a component into the virtual breadboard, and it automatically provides a user with a list of suggested components. These suggestions complete or extend the electronic functionality of the inserted component to save the user's time and reduce circuit error. To demonstrate the effectiveness of autocomplete, we implemented our system on Fritzing, a popular open source breadboard circuit prototyping software, used by novice makers. Our autocomplete suggestions were implemented based upon schematics from datasheets for standard components, as well as how components are used together from over 4000 circuit projects from the Fritzing community.
DOI
PDF
Video
Page

Pinpoint: A PCB Debugging Pipeline Using Interruptible Routing and Instrumentation (ACM CHI 2019)
Difficulties in accessing, isolating, and iterating on the components and connections of a printed circuit board (PCB) create unique challenges in PCB debugging. Manual probing methods are slow and error prone, and even dedicated PCB testing equipment remains limited by its inability to modify the circuit during testing. We present Pinpoint, a tool that facilitates in-circuit PCB debugging through techniques such as programmatically probing signals, dynamically disconnecting components and subcircuits to test in isolation, and splicing in new elements to explore potential modifications. Pinpoint automatically instruments a PCB design and generates designs for a physical jig board that interfaces the user's PCB to our custom testing hardware and to software tools.
DOI
PDF
Video
Page

A-line: 4D Printing Morphing Linear Composite Structures (ACM CHI 2019)
This paper presents A-line, a 4D printing system for designing and fabricating morphing three-dimensional shapes out of simple linear elements. In addition to the commonly known benefit of 4D printing to save printing time, printing materials, and packaging space, A-line also takes advantage of the unique properties of thin lines, including their suitability for compliant mechanisms and ability to travel through narrow spaces and self-deploy or self-lock on site. A-line integrates a method of bending angle control in up to eight directions for one printed line segment, using a single type of thermoplastic material.
DOI
Video
Page

Shape Changing Surfaces and Structures: Design Tools and Methods for Electroactive Polymers (ACM CHI 2019)
Electroactive polymers (EAP) are a promising material for shape changing Interfaces, soft robotics and other novel design explorations. However, the uptake of EAP prototyping in design, art and architecture has been slow due to limited commercial availability, challenging high voltage electronics and lack of simple fabrication techniques. This paper introduces DIY tools for building and activating EAP prototypes, together with design methods for making novel Shape-changing surfaces and structures, outside of material science labs. We present iterations of our methods and tools, their use and evaluation in participatory workshops and public installations and how they affect the design outcomes.
DOI
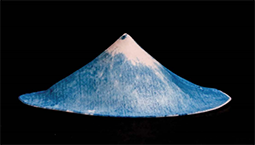
Geodesy: Self-rising 2.5D Tiles by Printing along 2D Geodesic Closed Path (ACM CHI 2019)
Thermoplastic and Fused Deposition Modeling (FDM) based 4D printing are rapidly expanding to allow for space- and material-saving 2D printed sheets morphing into 3D shapes when heated. However, to our knowledge, all the known examples are either origami-based models with obvious folding hinges, or beam-based models with holes on the morphing surfaces. Morphing continuous double-curvature surfaces remains a challenge, both in terms of a tailored toolpath-planning strategy and a computational model that simulates it. Additionally, neither approach takes surface texture as a design parameter in its computational pipeline. To extend the design space of FDM-based 4D printing, in Geodesy, we focus on the morphing of continuous double-curvature surfaces or surface textures.
DOI
PDF

Strong 3D Printing by TPMS Injection (IEEE TVCG 2019)
3D printed objects are rapidly becoming prevalent in science, technology and daily life. An important question is how to obtain strong and durable 3D models using standard printing techniques. This question is often translated to computing smartly designed interior structures that provide strong support and yield resistant 3D models. In this paper we suggest a combination between 3D printing and material injection to achieve strong 3D printed objects. We utilize triply periodic minimal surfaces (TPMS) to define novel interior support structures.
DOI
PDF

FormFab: Continuous Interactive Fabrication (ACM TEI 2019)
Several systems have illustrated the concept of interactive
fabrication, i.e. rather than working through a digital editor,
users make edits directly on the physical workpiece. However, so far the interaction has been limited to turn-taking,
i.e., users first perform a command and then the system
responds with physical feedback. In this paper, we present
a first step towards interactive fabrication that changes the
workpiece continuously while the user is manipulating it.
DOI
PDF
Video
Page

A Conversation with Actuators: An Exploratory Design Environment for Hybrid Materials (ACM TEI 2019)
An exciting, expanding palette of hybrid materials is emerging
that can be programmed to actuate by a range of external and
internal stimuli. However, there exists a dichotomy between
the physicality of the actuators and the intangible computational signal that is used to program them. For material practitioners, this lack of physical cues limits their ability to engage
in a "conversation with materials" (CwM). This paper presents
a creative workstation for supporting this epistemological style
by bringing a stronger physicality to the computational signal
and balance the conversation between physical and digital actors.
DOI
PDF
Page
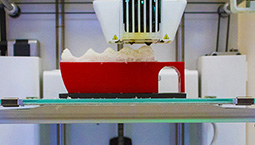
Sequential Support: 3D Printing Dissolvable Support Material for Time-Dependent Mechanisms (ACM TEI 2019)
In this paper, we propose a different perspective on the use of support material: rather than printing support structures for overhangs, our idea is to make use of its transient nature, i.e. the fact that it can be dissolved when placed in a solvent, such as water. This enables a range of new use cases, such as quickly dissolving and replacing parts of a prototype during design iteration, printing temporary assembly labels directly on the ob-ject that leave no marks when dissolved, and creating time-dependent mechanisms, such as fading in parts of an image in a shadow art piece or releasing relaxing scents from a 3D printed structure sequentially over-night. Since we use regular support material (PVA), our approach works on consumer 3D printers without any modifications.
DOI
PDF
Video
Page
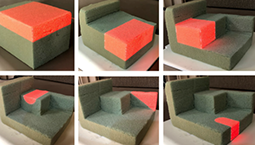
Interactive Fabrication of CSG Models with Assisted Carving (ACM TEI 2019)
We propose a method that helps an unskilled user to carve a physical replica of a 3D CAD model while only using manual cutting tools. The method starts by analyzing the input CAD model and generates a set of carving instructions. Then using a projector, we project the instructions sequentially one at a time to a block of material to guide the user in performing each of them. After each cutting step, we use the projector-camera setup to 3D scan the object after cutting. And automatically align the scanned point cloud to the CAD model, to prepare the position for the next instruction. We demonstrate a complete system to support this operation and show several examples manually carved while using the system.
DOI
PDF

When is it not Craft?: Materiality and Mediation when Craft and Computing Meet (ACM TEI 2019)
Craft has emerged as an important reference point for HCI. To avoid a misrepresenting, all-encompassing application of craft to interaction design, this position paper first discerns craft from HCI. It develops material engagement and mediation as differentiating factors to reposition craft in relation to tangible interaction design. The aim is to clarify craft's relation to interaction design and to open up new opportunities and questions that follow from this repositioning.
DOI
PDF
2018

3D Fabrication with Universal Building Blocks and Pyramidal Shells (SIGGRAPH ASIA 2018)
We introduce a computational solution for cost-efficient 3D fabrication using universal building blocks. Our key idea is to employ a set of universal blocks, which can be massively prefabricated at a low cost, to quickly assemble and constitute a significant internal core of the target object, so that only the residual volume need to be 3D printed online [...]
DOI
PDF
Page
Construction and Fabrication of Reversible Shape Transforms (SIGGRAPH ASIA 2018)
We study a new and elegant instance of geometric dissection of 2D shapes: reversible hinged dissection, which corresponds to a dual transform between two shapes where one of them can be dissected in its interior and then inverted inside-out, with hinges on the shape boundary, to reproduce the other shape, and vice versa. We call such a transform reversible inside-out transform or RIOT. [...]
DOI
PDF
Video
Page
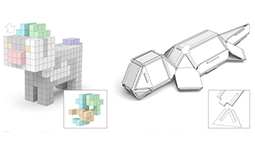
DESIA: A General Framework for Designing Interlocking Assemblies (SIGGRAPH ASIA 2018)
Interlocking assemblies have a long history in the design of puzzles, furniture, architecture, and other complex geometric structures. The key defining property of interlocking assemblies is that all component parts are immobilized by their geometric arrangement, preventing the assembly from falling apart. Computer graphics research has recently contributed design tools that allow creating new interlocking assemblies. [...]
DOI
PDF
Video
Page

PhotoShape: Photorealistic Materials for Large-Scale Shape Collections (SIGGRAPH ASIA 2018)
Existing online 3D shape repositories contain thousands of 3D models but lack photorealistic appearance. We present an approach to automatically assign high-quality, realistic appearance models to large scale 3D shape collections. The key idea is to jointly leverage three types of online data - shape collections, material collections, and photo collections, using the photos as reference to guide assignment of materials to shapes [...]
DOI
PDF
Video
Page

Deep Multispectral Painting Reproduction Via Multi-Layer, Custom-Ink Printing (SIGGRAPH ASIA 2018)
We propose a worklow for spectral reproduction of paintings, which captures a painting’s spectral color, invariant to illumination, and reproduces it using multi-material 3D printing. We take advantage of the current 3D printers’ capabilities of combining highly concentrated inks with a large number of layers, to expand the spectral gamut of a set of inks. We use a data-driven method to both predict the spectrum of a printed ink stack and optimize for the stack layout that best matches a target spectrum [...]
DOI
PDF
Video
Page
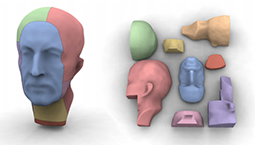
Axis-Aligned Height-Field Block Decomposition of 3D Shapes (SIGGRAPH ASIA 2018)
We propose a novel algorithm for decomposing general three-dimensional geometries into a small set of overlap-free height-field blocks, volumes enclosed by a flat base and a height-field surface defined with respect to this base. This decomposition is useful for fabrication methodologies such as 3-axis CNC milling, where a single milling pass can only carve a single height-field surface defined with respect to the machine tray but can also benefit other fabrication settings. Computing our desired decomposition requires solving a highly constrained discrete optimization problem, variants of which are known to be NP-hard [...]
DOI
PDF
Video
Page

Acquiring Spatially Varying Appearance of Printed Holographic Surfaces (SIGGRAPH ASIA 2018)
We present two novel and complimentary approaches to measure diffraction effects in commonly found planar spatially varying holographic surfaces. Such surfaces are increasingly found in various decorative materials such as gift bags, holographic papers, clothing and security holograms, and produce impressive visual effects that have not been previously acquired for realistic rendering. Such holographic surfaces are usually manufactured with one dimensional diffraction gratings that are varying in periodicity and orientation over an entire sample in order to produce a wide range of diffraction effects such as gradients and kinematic (rotational) effects [...]
DOI
PDF
Video
Page

An Adaptive Parameterization for Efficient Material Acquisition and Rendering (SIGGRAPH ASIA 2018)
One of the key ingredients of any physically based rendering system is a detailed specification characterizing the interaction of light and matter of all materials present in a scene, typically via the Bidirectional Reflectance Distribution Function (BRDF). Despite their utility, access to real-world BRDF datasets remains limited: this is because measurements involve scanning a four-dimensional domain at sufficient resolution, a tedious and often infeasibly time-consuming process. We propose a new parameterization that automatically adapts to the behavior of a material, warping the underlying 4D domain so that most of the volume maps to regions where the BRDF takes on non-negligible values, while irrelevant regions are strongly compressed.[...]
DOI
PDF
Video
Page

Fabricable Eulerian Wires for 3D Shape Abstraction (SIGGRAPH ASIA 2018)
We present a fully automatic method that finds a small number of machine fabricable wires with minimal overlap to reproduce a wire sculpture design as a 3D shape abstraction. Importantly, we consider non-planar wires, which can be fabricated by a wire bending machine, to enable efficient construction of complex 3D sculptures that cannot be achieved by previous works. We call our wires Eulerian wires, since they are as Eulerian as possible with small overlap to form the target design together [...]
DOI
PDF
Video
Page
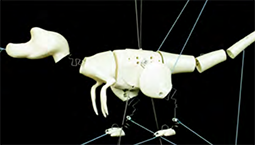
Bend-It: Design and Fabrication of Kinetic Wire Characters (SIGGRAPH ASIA 2018)
Elastically deforming wire structures are lightweight, durable, and can be bent within minutes using CNC bending machines. We present a computational technique for the design of kinetic wire characters, tailored for fabrication on consumer-grade hardware. Our technique takes as input a network of curves or a skeletal animation, then estimates a cable-driven, compliant wire structure which matches user-selected targets or keyframes as closely as possible [...]
DOI
PDF
Video
Page

FlexMaps: Computational Design of Flat Flexible Shells for Shaping 3D Objects (SIGGRAPH ASIA 2018)
We propose FlexMaps, a novel framework for fabricating smooth shapes out of flat, flexible panels with tailored mechanical properties. We start by mapping the 3D surface onto a 2D domain as in traditional UV mapping to design a set of deformable flat panels called FlexMaps. For these panels, we design and obtain specific mechanical properties such that, once they are assembled, the static equilibrium configuration matches the desired 3D shape. FlexMaps can be fabricated from an almost rigid material, such as wood or plastic, and are made flexible in a controlled way by using computationally designed spiraling microstructures [...]
DOI
PDF
Video
Page
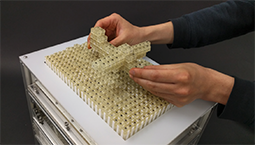
Dynablock: Dynamic 3D Printing for Instant and Reconstructable Shape Formation (ACM UIST 2018)
This paper introduces Dynamic 3D Printing, a fast and reconstructable shape formation system.
Dynamic 3D Printing can assemble an arbitrary three-dimensional shape from a large number of small physical elements.
Also, it can disassemble the shape back to elements and reconstruct a new shape.
Dynamic 3D Printing combines the capabilities of 3D printers and shape displays:
Like conventional 3D printing, it can generate arbitrary and graspable three-dimensional shapes, while allowing shapes to be rapidly formed and reformed as in a shape display.
To demonstrate the idea, [...]
DOI
PDF
Video

TrussFormer: 3D Printing Large Kinetic Structures (ACM UIST 2018)
This paper introduces Dynamic 3D Printing, a fast and reconstructable shape formation system.
Dynamic 3D Printing can assemble an arbitrary three-dimensional shape from a large number of small physical elements.
Also, it can disassemble the shape back to elements and reconstruct a new shape.
Dynamic 3D Printing combines the capabilities of 3D printers and shape displays:
Like conventional 3D printing, it can generate arbitrary and graspable three-dimensional shapes, while allowing shapes to be rapidly formed and reformed as in a shape display.
To demonstrate the idea, [...]
DOI
PDF
Video
Page
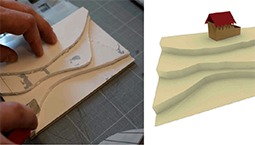
Shape-Aware Material: Interactive Fabrication with ShapeMe (ACM UIST 2018)
Makers often create both physical and digital prototypes to explore a design, taking advantage of the subtle feel of physical materials and the precision and power of digital models. We introduce ShapeMe, a novel smart material that captures its own geometry as it is physically cut by an artist or designer. ShapeMe includes a software toolkit that lets its users generate customized, embeddable sensors that can accommodate various object shapes. As the designer works on a physical prototype, the toolkit streams the artist's physical changes to its digital counterpart in a 3D CAD environment. We use a rapid, inexpensive and simple-to-manufacture inkjet printing
[...]
DOI
PDF
Video

Wireless Analytics for 3D Printed Objects (ACM UIST 2018)
We present the first wireless physical analytics system for 3D printed objects using commonly available conductive plastic filaments. Our design can enable various data capture and wireless physical analytics capabilities for 3D printed objects, without the need for electronics. To achieve this goal, we make three key contributions: (1) demonstrate room scale backscatter communication and sensing using conductive plastic filaments, (2) introduce the first backscatter designs that detect a variety of bi-directional motions [...]
DOI
PDF
Video
Page

Assembly-aware Design of Printable Electromechanical Devices (ACM UIST 2018)
From smart toys and household appliances to personal robots, electromechanical devices play an increasingly important role in our daily lives. Rather than relying on gadgets that are mass-produced, our goal is to enable casual users to custom-design such devices based on their own needs and preferences. To this end, we present a computational design system that leverages the power of digital fabrication and the emergence of affordable electronics such as sensors and microcontrollers. The input to our system consists of a 3D representation of the desired device's shape, and a set of user-preferred off-the-shelf components. Based on this input, our method generates an optimized, 3D printable enclosure
[...]
DOI
PDF
Video
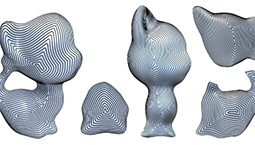
DSCarver: Decompose-and-Spiral-Carve for Subtractive Manufacturing (ACM SIGGRAPH 2018)
We present an automatic algorithm for subtractive manufacturing of freeform 3D objects using high-speed machining (HSM) via CNC. A CNC machine operates a cylindrical cutter to carve off material from a 3D shape stock, following a tool path, to "expose" the target object. Our method decomposes the input object's surface into a small number of patches each of which is fully accessible and machinable by the CNC machine, in continuous fashion, under a fixed cutter-object setup configuration.
DOI
PDF
Video
Page

Stitch Meshing (ACM SIGGRAPH 2018)
We introduce the first fully automatic pipeline to convert arbitrary 3D shapes into knit models. Our pipeline is based on a global parametrization remeshing pipeline to produce an isotropic quad-dominant mesh aligned with a 2-RoSy field. The knitting directions over the surface are determined using a set of custom topological operations and a two-step global optimization that minimizes the number of irregularities. The resulting mesh is converted into a valid stitch mesh that represents the knit model. The yarn curves are generated from the stitch mesh and the final yarn geometry is
[...]
DOI
PDF
Video
Page
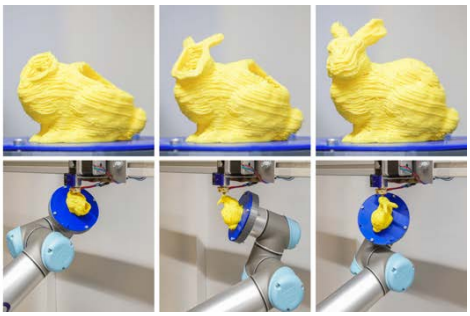
Support-free volume printing by multi-axis motion (ACM SIGGRAPH 2018)
This paper presents a new method to fabricate 3D models on a robotic printing system equipped with multi-axis motion. Materials are accumulated inside the volume along curved tool-paths so that the need of supporting structures can be tremendously reduced - if not completely abandoned - on all models. Our strategy to tackle the challenge of tool-path planning for multi-axis 3D printing is to perform two successive decompositions, first
[...]
DOI
PDF
Video

CoreCavity: interactive shell decomposition for fabrication with two-piece rigid molds (ACM SIGGRAPH 2018)
Molding is a popular mass production method, in which the initial expenses for the mold are offset by the low per-unit production cost. However, the physical fabrication constraints of the molding technique
[...]
DOI
PDF
Video
Page

Metamolds: Computational Design of Silicone Molds (ACM SIGGRAPH 2018)
We propose a new method for fabricating digital objects through reusable silicone molds. Molds are generated by casting liquid silicone into custom 3D printed containers called metamolds. Metamolds automatically define the cuts that are needed to extract the cast object from the silicone mold. The
[...]
DOI
PDF
Video
Page
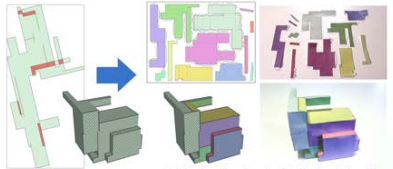
Box cutter: atlas refinement for efficient packing via void elimination (ACM SIGGRAPH 2018)
We propose Box Cutter, a new method for optimizing packing efficiency suitable for both settings. Our algorithm improves packing efficiency without changing distortion by strategically cutting and repacking the atlas charts or panels. It preserves the local mapping between the 3D surface and the atlas charts and retains global mapping continuity across the newly formed cuts. We balance packing efficiency improvement against increase in chart
[...]
DOI
PDF
Video
Page
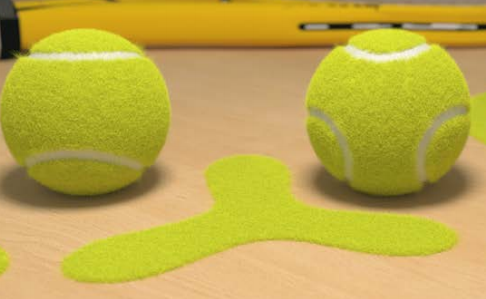
Variational Surface Cutting (ACM SIGGRAPH 2018)
This paper develops a global variational approach to cutting curved surfaces so that they can be flattened into the plane with low metric distortion. Such cuts are a critical component in a variety of algorithms that seek to parameterize surfaces over flat domains, or fabricate structures from flat materials. Rather than evaluate the quality of a cut solely based on properties of the curve itself (e.g., its length or curvature), we formulate a flow
[...]
DOI
PDF
Video
Page
3D printing spatially varying color and translucency (ACM SIGGRAPH 2018)
We present an efficient and scalable pipeline for fabricating full-colored objects with spatially-varying translucency from practical and accessible input data via multi-material 3D printing. Observing that the costs associated with BSSRDF measurement and processing are high, the range of 3D printable BSSRDFs are severely limited, and that the human visual system relies only on simple high-level cues to perceive translucency, we propose a method
[...]
DOI
PDF
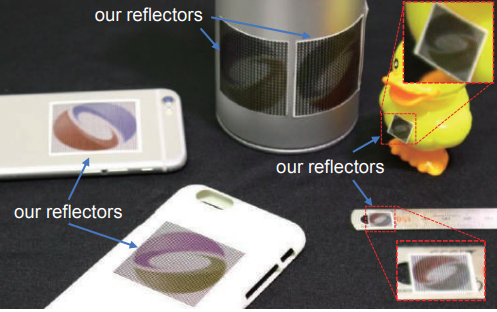
Fabricating reflectors for displaying multiple images (ACM SIGGRAPH 2018)
A great deal of attention has been devoted to the fabrication of reflectors that can display different color images when viewed from different directions not only in industry but also for the arts. Although such reflectors have previously been successfully fabricated, the number of images displayed has
[...]
DOI
PDF
Video
Page
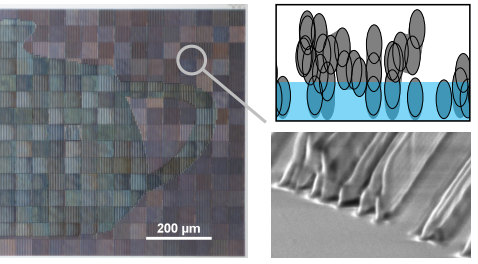
Computational design of nanostructural color for additive manufacturing (ACM SIGGRAPH 2018)
In this work, we explore the use of additive manufacturing for generating structural colors, where the structures are designed using a fabrication-aware optimization process. This requires a combination of full-wave simulation, a feasible parameterization of the design space, and a tailored
[...]
DOI
PDF
Page

Skaterbots: optimization-based design and motion synthesis for robotic creatures with legs and wheels
(ACM SIGGRAPH 2018)
We present a computation-driven approach to design optimization and motion synthesis for robotic creatures that locomote using arbitrary arrangements of legs and wheels. Through an intuitive interface, designers first create unique robots by combining different types of servomotors, 3D printable connectors, wheels and feet in a mix-and-match manner. With the resulting robot as input, a novel trajectory optimization formulation
[...]
DOI
PDF
Video
Page
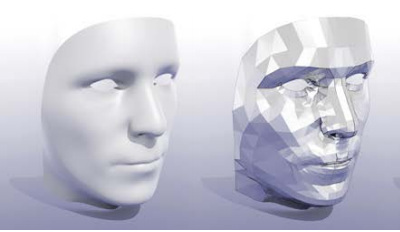
Developability of triangle meshes (ACM SIGGRAPH 2018)
Developable surfaces are those that can be made by smoothly bending flat pieces without stretching or shearing. We introduce a definition of developability for triangle meshes which exactly captures two key properties of smooth developable surfaces, namely flattenability and presence of straight ruling lines. This definition provides a starting point for algorithms in developable surface modeling---we consider a variational approach that
[...]
DOI
PDF
Video
Page

Shape representation by zippables (ACM SIGGRAPH 2018)
Fabrication from developable parts is the basis for arts such as papercraft and needlework, as well as modern architecture and CAD in general, and it has inspired much research. We observe that the assembly of complex 3D shapes created by existing methods often requires first fabricating many small parts and then carefully following instructions to assemble them together. Despite its significance, this error prone and tedious process is
[...]
DOI
PDF
Video
Page
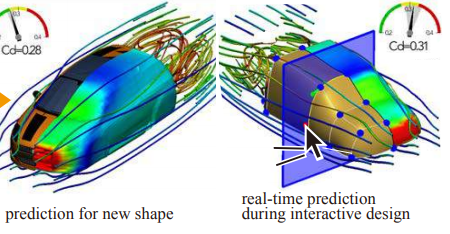
Learning three-dimensional flow for interactive aerodynamic design (ACM SIGGRAPH 2018)
We present a data-driven technique to instantly predict how fluid flows around various three-dimensional objects. Such simulation is useful for computational fabrication and engineering, but is usually computationally expensive since it requires solving the Navier-Stokes equation for many time
[...]
DOI
PDF
Video
Page
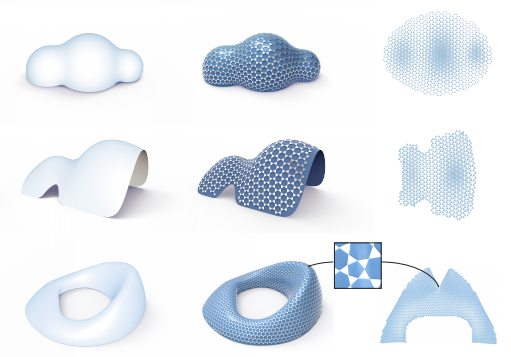
Rapid deployment of curved surfaces via programmable auxetics (ACM SIGGRAPH 2018)
Deployable structures are physical mechanisms that can easily transition between two or more geometric configurations; such structures enable industrial, scientific, and consumer applications at a wide variety of scales. This paper develops novel deployable structures that can approximate a
[...]
DOI
PDF
Video
Page
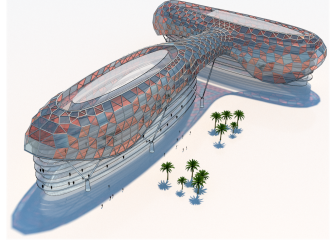
Designing patterns using triangle-quad hybrid meshes (ACM SIGGRAPH 2018)
We present a framework to generate mesh patterns that consist of a hybrid of both triangles and quads. Given a 3D surface, the generated patterns fit the surface boundaries and curvatures. Such regular and near regular triangle-quad hybrid meshes provide two key advantages: first, novel-looking
[...]
DOI
PDF
Video
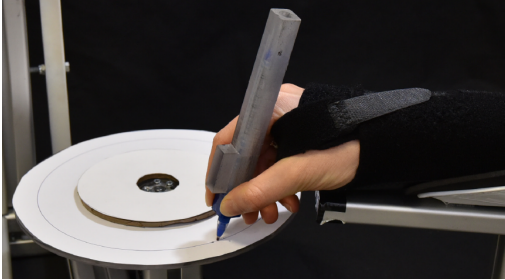
Perception-aware modeling and fabrication of digital drawing tools (ACM SIGGRAPH 2018)
Digital drawing is becoming a favorite technique for many artists. It allows for quick swaps between different materials, reverting changes, and applying selective modifications to finished artwork. These features enable artists to be more efficient and creative. A significant disadvantage of digital drawing is poor haptic feedback. Artists are usually
[...]
DOI
PDF
Video
Page
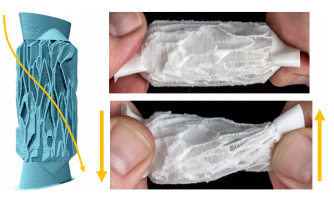
Polyhedral voronoi diagrams for additive manufacturing (ACM SIGGRAPH 2018)
A critical advantage of additive manufacturing is its ability to fabricate complex small-scale structures. These microstructures can be understood as a metamaterial: they exist at a much smaller scale than the volume they fill, and are collectively responsible for an average elastic behavior different from that of the base
[...]
DOI
PDF
Video
Page
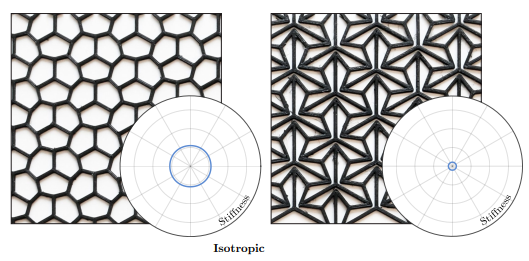
Mechanical characterization of structured sheet materials (ACM SIGGRAPH 2018)
We propose a comprehensive approach to characterizing the mechanical properties of structured sheet materials, i.e., planar rod networks whose mechanics and aesthetics are inextricably linked. We establish a connection between the complex mesoscopic deformation behavior of such structures and their macroscopic elastic properties through numerical homogenization. Our approach leverages 3D
[...]
DOI
PDF
Video
Page
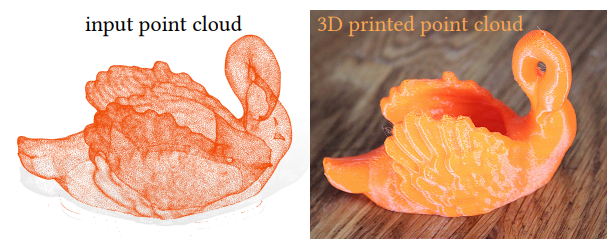
Fast winding numbers for soups and clouds (ACM SIGGRAPH 2018)
Inside-outside determination is a basic building block for higher-level geometry processing operations. Generalized winding numbers provide a robust answer for triangle meshes, regardless of defects such as self-intersections, holes or degeneracies. In this paper, we further generalize the winding number to point clouds. Previous methods for evaluating the winding number
[...]
DOI
PDF
Page
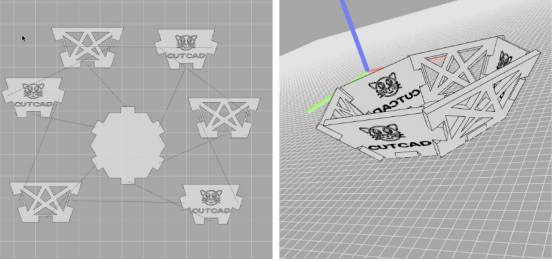
CutCAD - An Open-source Tool to Design 3D Objects in 2D (ACM DIS 2018)
Laser cutters are 2D tools, but their speed and compatibility with a variety of affordable materials also makes them a frequent choice to create 3D objects. We propose CutCAD, a tool to easily construct simple 3D objects from 2D faces,
[...]
DOI
PDF
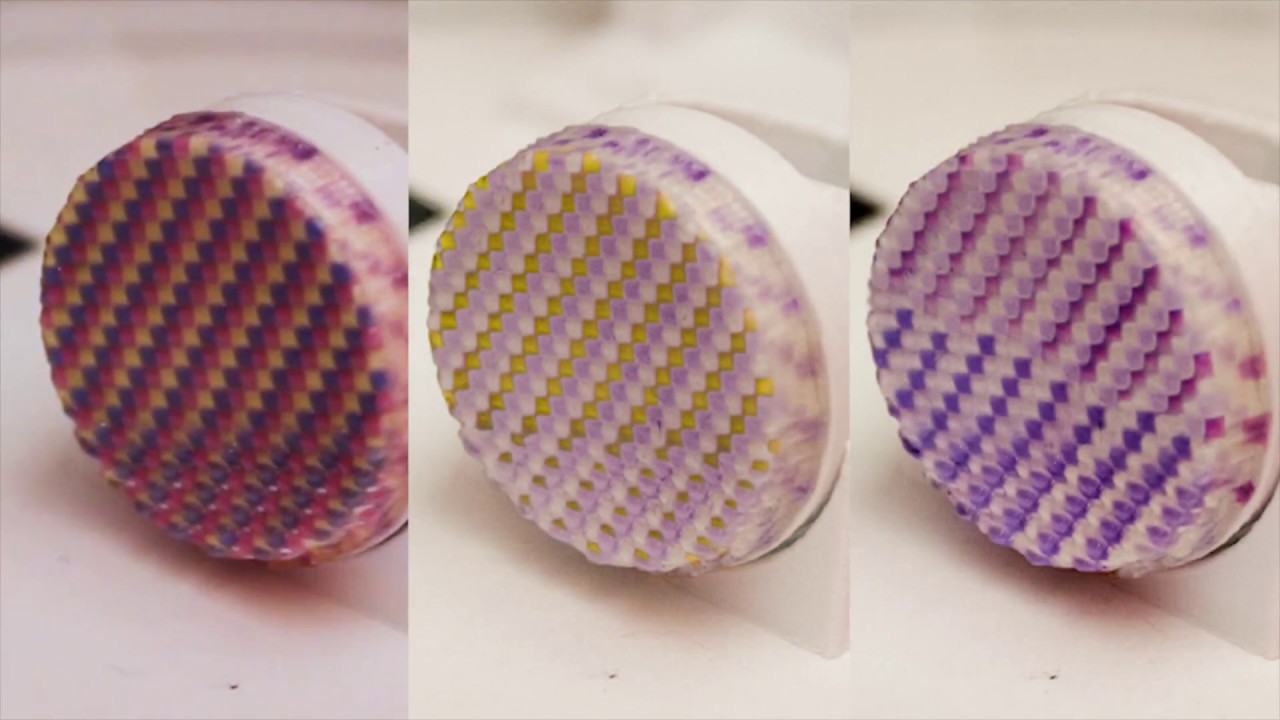
ColorMod: Recoloring 3D Printed Objects using Photochromic Inks (ACM CHI 2018)
Recent research has shown how to change the color of existing objects using photochromic materials. These materials can switch their appearance from transparent to colored when exposed to light of a certain wavelength. The color remains even when the object is removed from the light source. The process is fully reversible allowing users to recolor the object as many times as they want. In this paper, we present ColorFab, a method to extend this approach to multi-color changes (e.g., red-to-yellow)
[...]
DOI
PDF
Video
Page
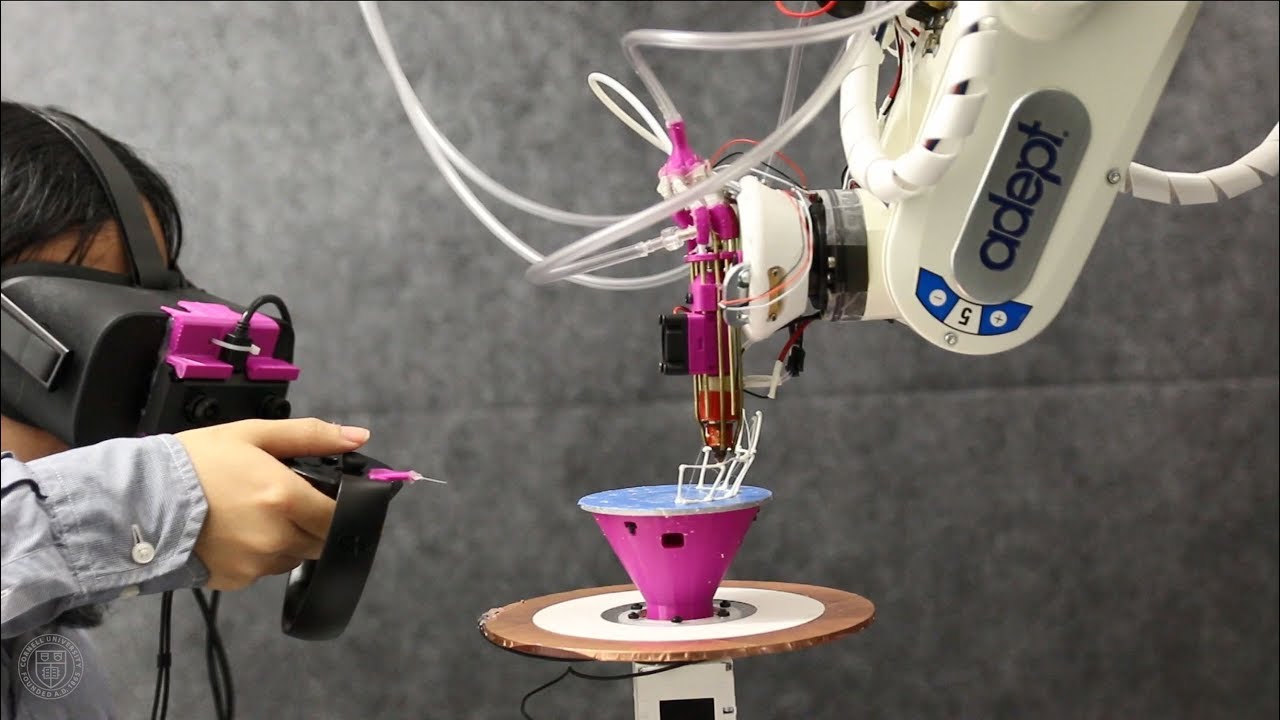
RoMA: Interactive Fabrication with Augmented Reality and a Robotic 3D Printer (ACM CHI 2018)
We present the Robotic Modeling Assistant (RoMA), an interactive fabrication system providing a fast, precise, hands-on and in-situ modeling experience. As a designer creates a new model using RoMA AR CAD editor, features are constructed concurrently by a 3D printing robotic arm sharing the same design volume. The partially printed physical model then serves as a tangible reference for the designer as she adds new elements to her design. RoMA's proxemics-inspired handshake mechanism between the designer and
[...]
DOI
PDF
Video
Page
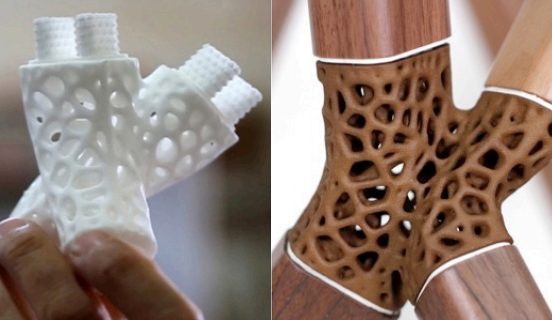
Digital Joinery For Hybrid Carpentry (ACM CHI 2018)
The craft of carpentry relies on joinery: the connections between pieces of wood to create multipart structures. In traditional woodworking, joints are limited to the manual chisel skills of the craftsperson, or to capabilities of the machines, which favorite 90° or 180° angle joints with no more than two elements. We contribute an interactive design process in which joints are
[...]
DOI
PDF
Video
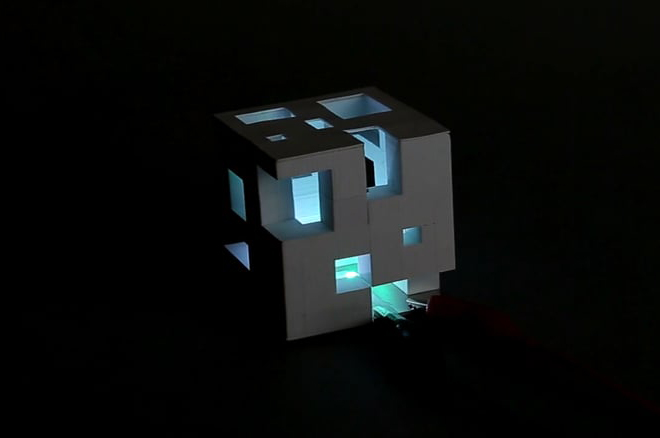
PEP (3D Printed Electronic Papercrafts): An Integrated Approach for 3D Sculpting Paper-Based Electronic Devices (ACM CHI 2018)
We present PEP (Printed Electronic Papercrafts), a set of design and fabrication techniques to integrate electronic based interactivities into printed papercrafts via 3D sculpting. We explore the design space of PEP, integrating four functions into 3D paper products: actuation, sensing, display, and communication, leveraging the expressive and technical opportunities enabled by
[...]
DOI
PDF
Video

MatchSticks: Woodworking through Improvisational Digital Fabrication (ACM CHI 2018)
Digital fabrication tools have broadened participation in making and enabled new methods of rapid physical prototyping across diverse materials. We present a novel smart tool designed to complement one of the first materials employed by humans - wood - and celebrate the fabrication practice of joinery. Our tool, MatchSticks, is a digital fabrication system tailored for joinery. Combining a portable CNC machine, touchscreen user interface, and parametric joint library, MatchSticks enables
[...]
DOI
PDF
Video
Page
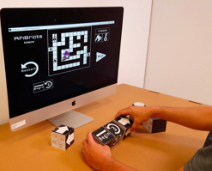
RFIBricks: Interactive Building Blocks Based on RFID (ACM CHI 2018)
We present RFIBricks, an interactive building block system based on ultrahigh frequency radio-frequency identification (RFID) sensing. The system enables geometry resolution based on a simple yet highly generalizable mechanism: an RFID contact switch, which is made by cutting each RFID tag into two parts, namely antenna and chip. A magnetic connector is then coupled with each part. When the antenna and chip connect, an interaction event with an ID is transmitted to the reader. On the basis of our design of RFID contact switch patterns
[...]
DOI
PDF
Video
Page
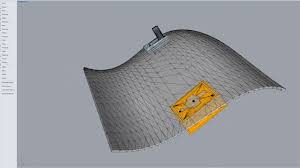
PHUI-kit: Interface Layout and Fabrication on Curved 3D Printed Objects (ACM CHI 2018)
We seek to make physical user interface (PHUI) design more like graphical user interface (GUI) design by using a drag-and drop interface to place widgets, allowing widgets to be repositioned and by hiding implementation details. PHUIs are interfaces built from tangible widgets arranged on the surfaces of physical objects. PHUI layout will become more important as we move from rectangular screens
[...]
DOI
PDF
Video
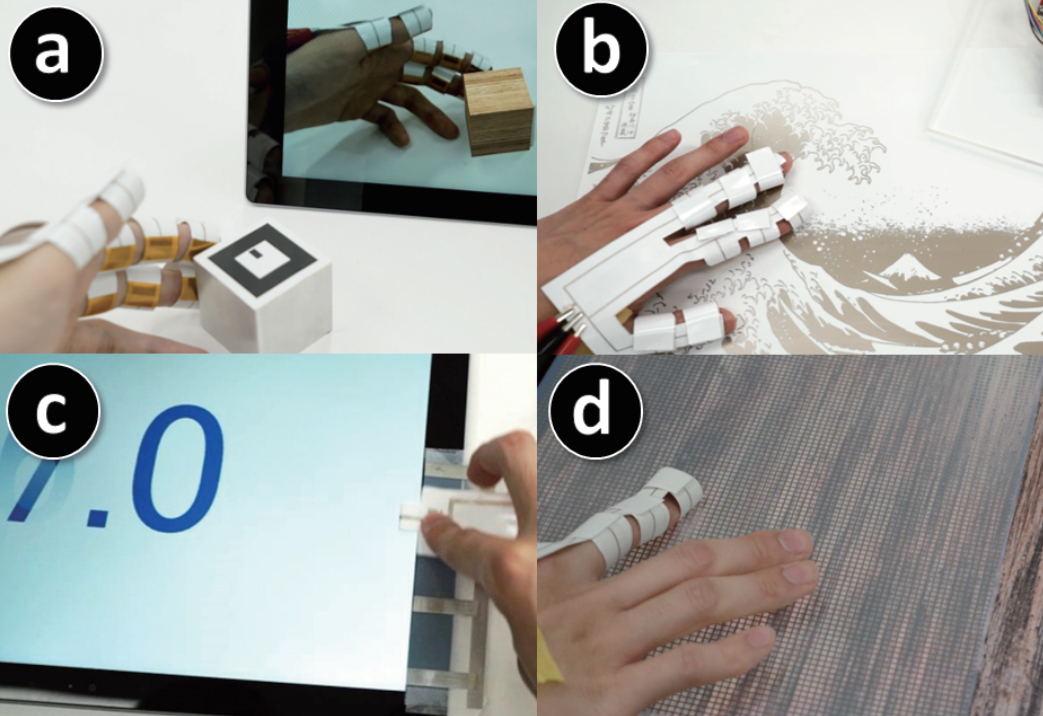
Double-sided Printed Tactile Display with Electro Stimuli and Electrostatic Forces and its Assessment (ACM CHI 2018)
Humans can perceive tactile sensation through multimodal stimuli. To demonstrate realistic pseudo tactile sensation for the users, a tactile display is needed that can provide multiple tactile stimuli. In this paper, we have explicated a novel printed tactile display that can provide both the electrical stimulus and the electrostatic force. The circuit patterns for each stimulus were fabricated by employing the technique of
[...]
DOI
PDF
Video

Sketch&Stitch: Interactive Embroidery for E-textiles (ACM CHI 2018)
E-Textiles are fabrics that integrate electronic circuits and components. Makers use them to create interactive clothing, furniture, and toys. However, this requires significant manual labor and skills, and using technology-centric design tools. We introduce Sketch&Stitch, an interactive embroidery system to create e-textiles using a traditional crafting approach: Users draw their art and circuit directly on fabric using
[...]
DOI
PDF
Video
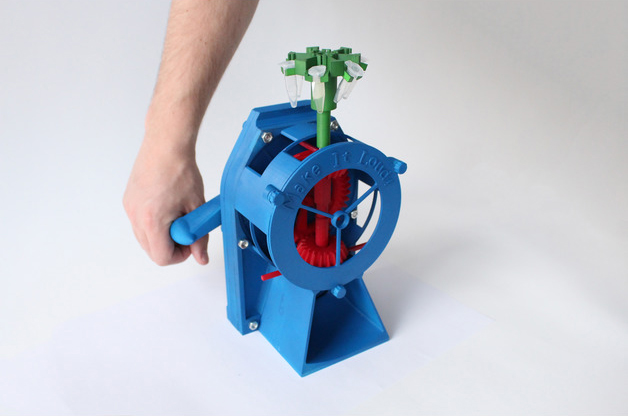
Grafter: Remixing 3D-Printed Machines (ACM CHI 2018)
Creating new 3D printed objects by recombining models found in hobbyist repositories has been referred to as “re-mixing”. In this paper, we explore how to best support users in remixing a specific class of 3D printed objects, namely those that perform mechanical functions. Grafter does two things. First, grafter largely automates the process of extracting and recombining mechanical elements from 3D printed machines. Second, it enforces a more efficient approach to reuse: it prevents users from extracting
[...]
DOI
PDF
Video

Thermorph: Democratizing 4D Printing of Self-Folding Materials and Interfaces (ACM CHI 2018)
We develop a novel method printing complex self-folding geometries. We demonstrated that with a desktop fused deposition modeling (FDM) 3D printer, off-the-shelf printing filaments and a design editor, we can print flat thermoplastic composites and trigger them to self-fold into 3D with arbitrary bending angles. This is a suitable technique, called Thermorph, to prototype hollow and
[...]
DOI
PDF
Video
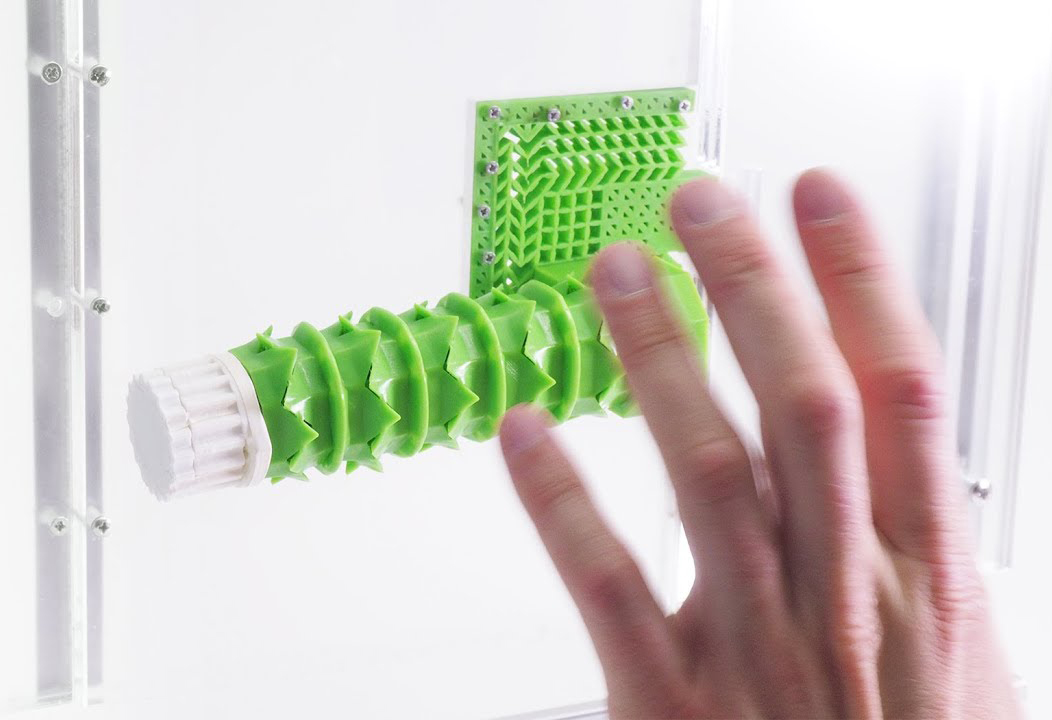
Metamaterial Textures (ACM CHI 2018)
We present metamaterial textures---3D printed surface geometries that can perform a controlled transition between two or more textures. Metamaterial textures are integrated into 3D printed objects and allow designing how the object interacts with the environment and the user’s tactile sense. Inspired by foldable paper sheets (“origami”) and surface wrinkling, our 3D printed metamaterial textures consist of a grid of cells that fold when compressed
[...]
DOI
PDF
Video
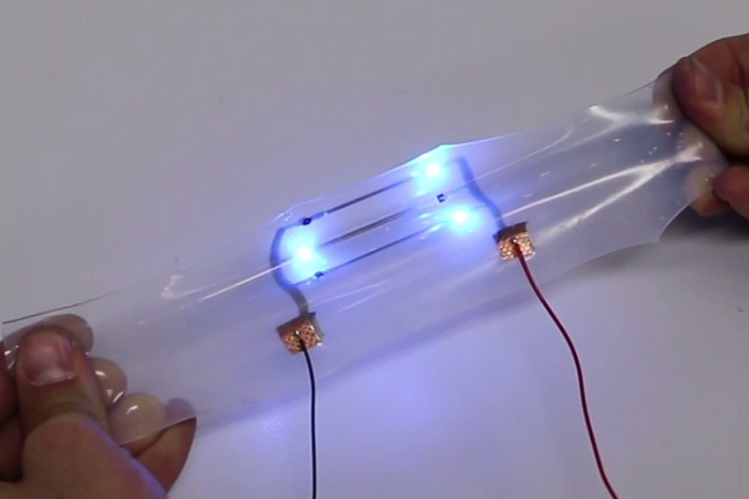
Silicone Devices: A Scalable DIY Approach for Fabricating Self-Contained Multi-Layered Soft Circuits using Microfluidics (ACM CHI 2018)
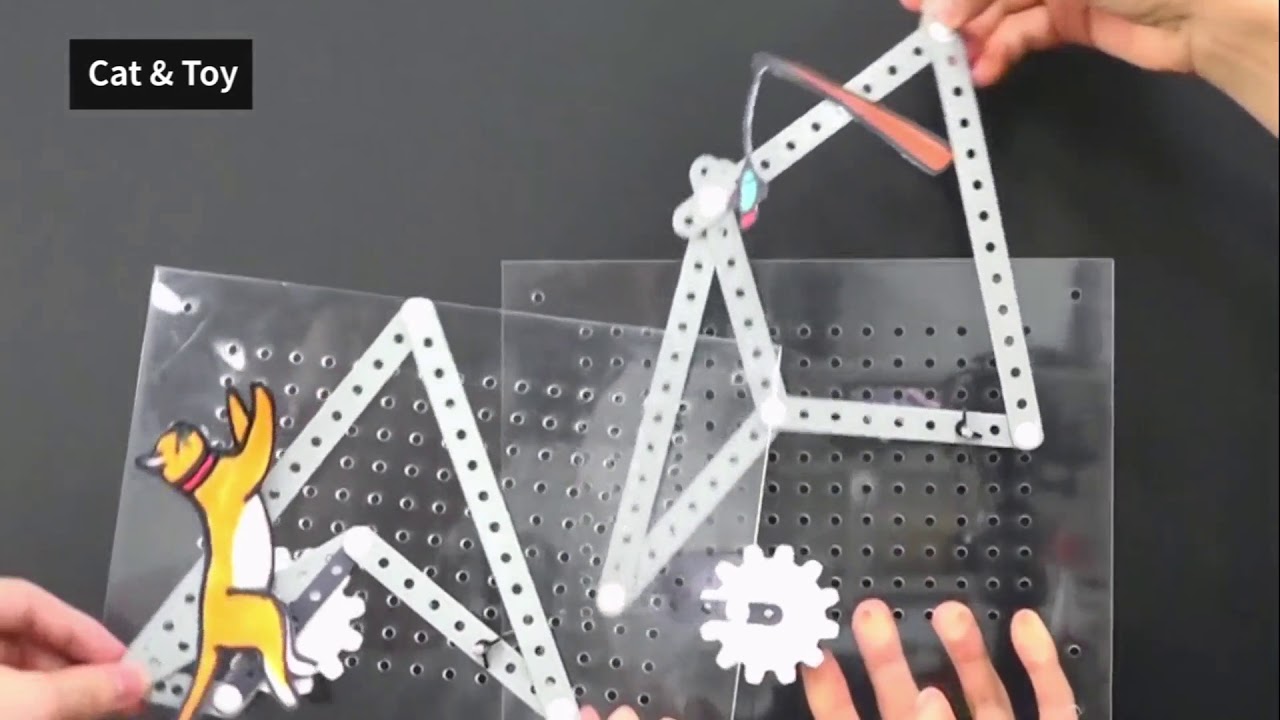
Mechanism Perfboard: An Augmented Reality Environment for Linkage Mechanism Design and Fabrication (ACM CHI 2018)
Prototyping devices with kinetic mechanisms, such as automata and robots, has become common in physical computing projects. However, mechanism design in the early-concept exploration phase is challenging, due to the dynamic and unpredictable characteristics of mechanisms. We present Mechanism Perfboard, an augmented reality environment that supports linkage
[...]
DOI
PDF
Video

Greater than the Sum of its PARTs: ExpressIng and ReusIng design intent In 3D models (ACM CHI 2018)
With the IncreasIng popularity of conSumer-grade 3D prIntIng, many people are creatIng, and even more usIng, objects shared on sites such as ThIngiverse. However, our formative study of 962 ThIngiverse models shows a lack of re-use of models, perhaps due to the advanced skills needed for 3D modelIng. An end user program perspective on 3D modelIng is needed. Our framework (PARTs) empowers amateur modelers to graphically specify design intent through geometry. PARTs Includes a GUI, scriptIng API
[...]
DOI
PDF
Video

Medley: A library of embeddables to explore Rich material properties for 3D printed objects (ACM CHI 2018)
In our everyday life, we interact with and benefit from objects with a wide range of material properties. In contrast, personal fabrication machines (e.g., desktop 3D printers) currently only support a much smaller set of materials. Our goal is to close the gap between current limitations and the future of multi-material printing by enabling people to explore the reuse of material from
[...]
DOI
PDF
Video

Digital Konditorei: programmable taste structures using a modular mold (ACM CHI 2018)
Digital Gastronomy (DG) is a culinary concept that enhances traditional cooking with new HCI capabilities, rather than replacing the chef with an autonomous machine. Preliminary projects demonstrate implementation of DG via the deployment of Digital instruments in a kitchen. Here we contribute an alternative solution, demonstrating the use of a modular (silicone) mold and a genetic mold-arrangement
[...]
DOI
PDF
Video

off-line sensing: Memorizing interactions in passive 3D-printed objects (ACM CHI 2018)
Embedding sensors into objects allow them to recognize various interactions. However, sensing usually requires active electronics that are often costly, need time to be assembled, and constantly draw power. Thus, we propose off-line sensing: passive 3D-printed sensors that detect one-time interactions, such as accelerating or flipping, but neither require active electronics nor power
[...]
DOI
PDF
Video
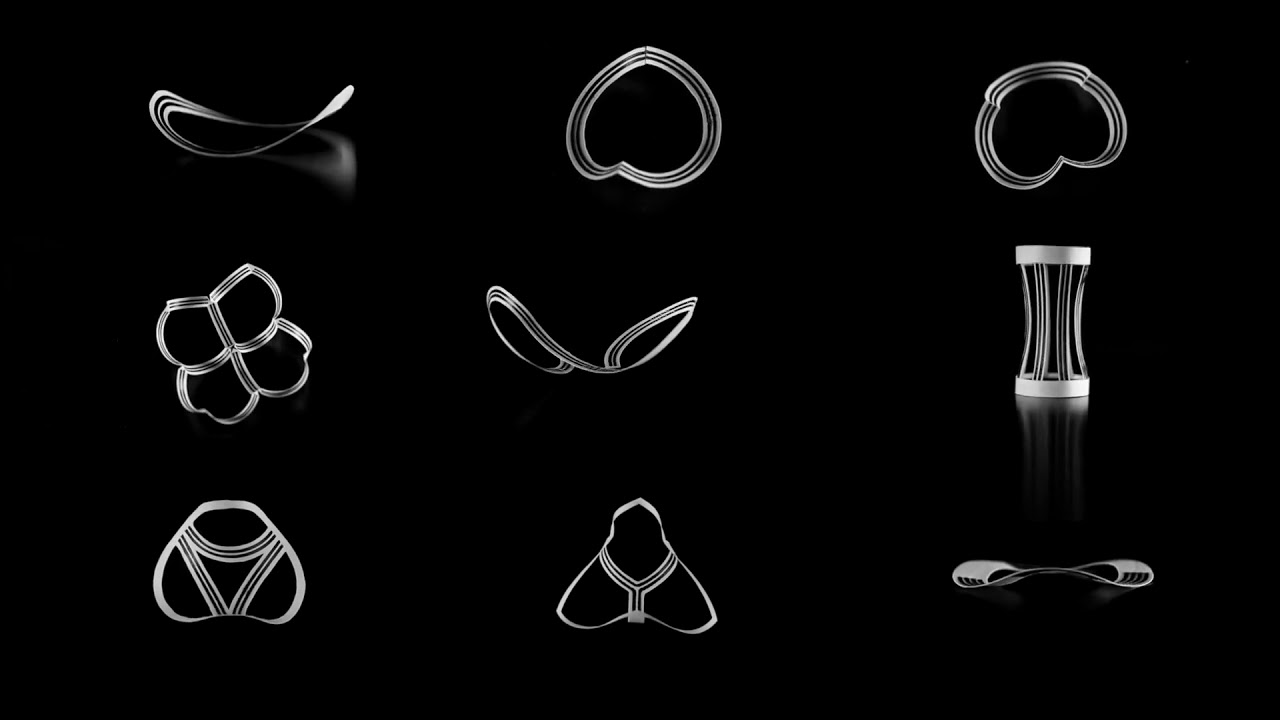
Demonstrating printed paper actuator: A Low-cost reversible actuation and sensing Method for shape Changing Interfaces (ACM CHI 2018)
We demonstrate printed paper actuator as a low cost, reversible and electrical actuation and sensing method. This is a novel but easily accessible enabling technology that expands upon the library of actuation-sensing materials in HCI. By integrating three physical phenomena, including the bilayer bending actuation, the shape memory effect of the thermoplastic and
[...]
DOI
PDF
Video

Papercut: Digital Fabrication and Design for Paper Cutting (ACM CHI 2018)
Chinese Paper-cut is an ancient folk art being thought to have originated in the 6th century. In traditional Paper-cut, it is necessary for workers or amateurs who have fertile imagination and professional cutting skills to achieve good visual enjoyment. However, this posed a challenge in pattern design and a dimensional imagination barrier in fabrication, it also requires sufficient training in
[...]
DOI
PDF
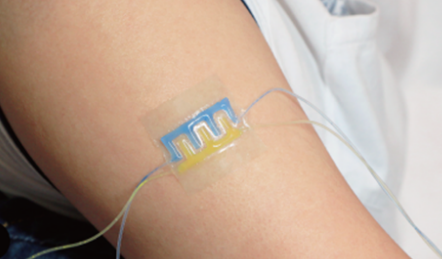
skin+: Fabricating soft fluidic user interfaces for Enhancing On-skin experiences and interactions (ACM CHI 2018)
Human skin is the largest organ on our body not only senses and external environment. A growing number of researchers devote themselves to design seamless interfaces directly on skin. In this late-breaking work, we propose a novel way for creating dynamic 2.5D skin textures, called skin+, a soft fluidic mini-scale user interface by introducing fluidic actuation. We have created four
[...]
DOI
PDF
2017

Computational Design of Wind-up Toys (SIGGRAPH ASIA 2017)
This paper presents a computational system to aid the design of wind-up toys, focusing on constructing a compact internal wind-up mechanism to realize user-requested part motions. The key contributions include an analytical modeling of a wide variety of elemental mechanisms found in common wind-up toys, including their geometry and kinematics, conceptual design of wind-up mechanisms by computing motion transfer trees to realize the requested part motions, automatic construction [...]
DOI
PDF
Video
Page
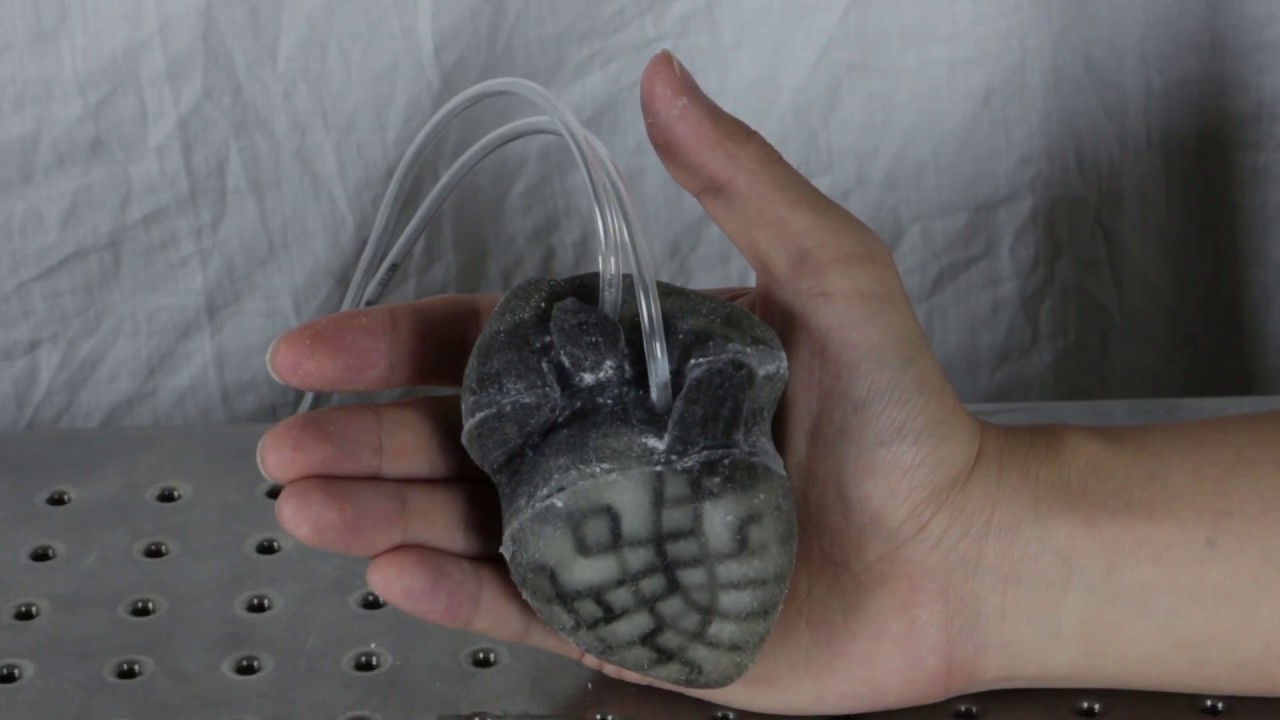
Computational Design and Fabrication of Soft Pneumatic Objects with Desired Deformations (SIGGRAPH ASIA 2017)
This paper presents an end-to-end solution for design and fabrication of soft pneumatic objects with desired deformations. Given a 3D object with its rest and deformed target shapes, the method automatically optimizes the chamber
structure and material distribution inside the object volume so that the fabricated object can deform to [...]
DOI
PDF
Video
Page

MetaSilicone: Design and Fabrication of Composite Silicone with Desired Mechanical Properties (SIGGRAPH ASIA 2017)
This paper presents a method for designing and fabricating MetaSilicones---composite silicone rubbers that exhibit desired macroscopic mechanical properties. The underlying principle of the approach is to inject spherical inclusions of a liquid dopant material into a silicone matrix material. By varying the number, size, and locations [...]
DOI
PDF
Video
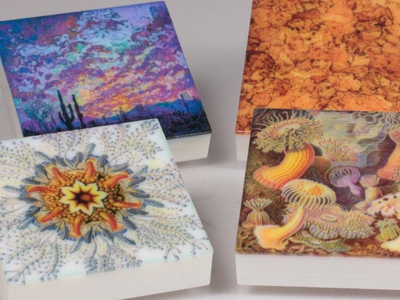
Scattering-aware Texture Reproduction for 3D Printing (SIGGRAPH ASIA 2017)
This paper uses heterogeneous scattering to obtain the impression of a crisp albedo texture on top of the 3D print, by optimizing for a fully volumetric material distribution that preserves the target appearance. The method employs an efficient numerical optimizer on top of a general Monte-Carlo simulation of heterogeneous scattering, supported by a practical calibration procedure to obtain scattering parameters from a given set of printer materials.[...]
DOI
PDF
Page

3D Printing Wireless Connected Objects (SIGGRAPH ASIA 2017)
This paper presents toolkit for wireless connectivity that can be integrated with 3D digital models and fabricated using commodity desktop 3D printers and commercially available plastic filament materials. The work introduces the first computational designs that 1) send data to commercial RF receivers including Wi-Fi, enabling 3D printed wireless sensors and input widgets, and [...]
DOI
PDF
Video

Reconfigurable Interlocking Furniture (SIGGRAPH ASIA 2017)
This paper presents computational methods as tools to assist the design and construction of reconfigurable assemblies, typically for furniture. The authors present the compatible decomposition as a weakly-constrained dissection problem, and derive its solution based on a dynamic bipartite graph to construct parts across multiple forms[...]
DOI
PDF
Video
Page

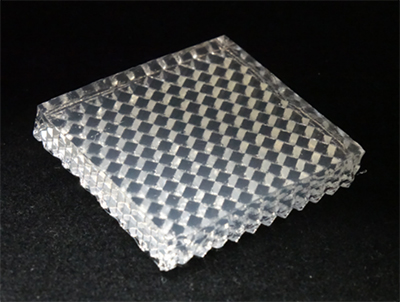
Edible retroreflector (ACM VRST 2017)
This paper proposes an edible retroreflector made from transparent foodstuffs. We found that kanten, or Japan agar, which is a traditional Japanese cooking ingredient used to form a transparent jelly, was suitable for forming such optical devices. A recipe for an edible retroreflector using kanten was developed. A prototype made from kanten showed a retroreflective function in reflectance measurement experiments.
[...]
DOI
Video

iSoft: A Customizable Soft Sensor with Real-time Continuous Contact and Stretching Sensing (ACM UIST 2017)
We present iSoft, a single volume soft sensor capable of sensing real-time continuous contact and unidirectional stretching. We propose a low-cost and an easy way to fabricate such piezoresistive elastomer-based soft sensors for instant interactions. We employ an electrical impedance tomography (EIT) technique to estimate changes of resistance distribution on the sensor caused by fingertip contact.
[...]
DOI
PDF
Video
Page
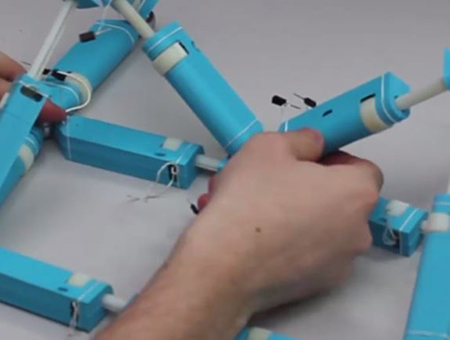
StrutModeling: A Low-Fidelity Construction Kit to Iteratively Model, Test, and Adapt 3D Objects (ACM UIST 2017)
We present StrutModeling, a computationally enhanced construction kit that enables users without a 3D modeling background to prototype 3D models by assembling struts and hub primitives in physical space. Physical 3D models are immediately captured in software and result in readily available models for 3D printing. Given the concrete physical format of StrutModels, modeled objects can be tested and fine tuned in the presence of existing objects and specific needs of users.
[...]
DOI
PDF
Video
Page

BlowFab: Rapid Prototyping for Rigid and Reusable Objects using Inflation of Laser-cut Surfaces (ACM UIST 2017)
This study proposes BlowFab, a prototyping method used to create a 2.5-dimensional prototype in a short time by combining laser cutting and blow molding techniques. The user creates adhesive areas and inflatable areas by engraving and cutting multilayered plastic sheets using a laser cutter. These adhesive areas are fused automatically by overlapping two crafted sheets and softening them with a heater. The user can then create hard prototypes by injecting air into the sheets.
[...]
DOI
Video
Page
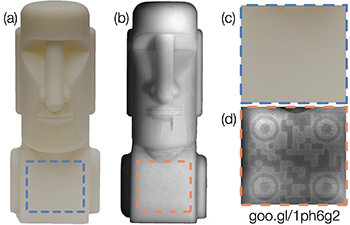
AirCode: Unobtrusive Physical Tags for Digital Fabrication (ACM UIST 2017)
We present AirCode, a technique that allows the user to tag physically fabricated objects with given information. An AirCode tag consists of a group of carefully designed air pockets placed beneath the object surface. These air pockets are easily produced during the fabrication process of the object, without any additional material or postprocessing.
[...]
DOI
PDF
Video
Page
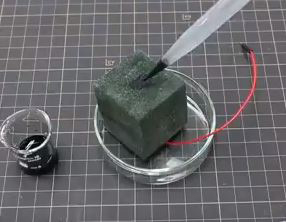
FoamSense: Design of Three Dimensional Soft Sensors with Porous Materials (ACM UIST 2017)
This sensor is made by impregnating a porous soft object with conductive ink. The design process of FoamSense is explained. We then summarized the features and basic characteristics of some porous materials for designing these sensors appropriately. We also proposed the potential of using digital fabrication for controlling the carrier structure of FoamSense. Proposed porous structure showed an anisotropic sensor characteristic. We discussed the potential and limitation of this approach.
[...]
DOI
Video
Page

Understanding Uncertainty in Measurement and Accommodating its Impact in 3D Modeling and Printing (ACM DIS 2017)
We demonstrate that measurement errors are a significant (yet often overlooked) challenge for end users through a systematic study of the sources and types of measurement errors. We argue for a new design principle--accommodating measurement error--that designers, as well as novice modelers, should to use at design time. We offer two strategies--buffer insertion and replacement of minimal parts--to help designers, as well as novice modelers, to build models that are robust to measurement error. We argue that these strategies can reduce the need for and costs of iteration and demonstrate their use in a series of printed objects.
[...]
DOI
PDF
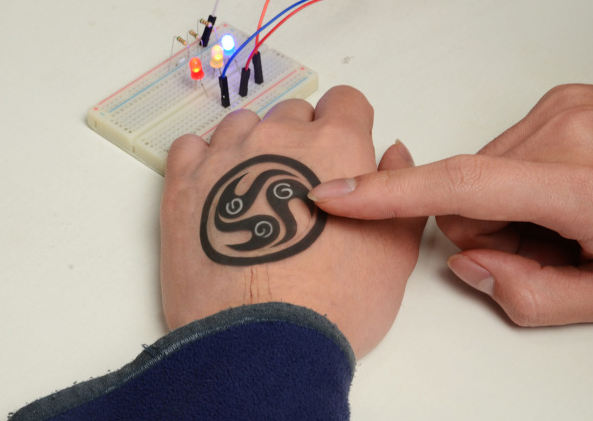
AnimSkin: Fabricating Epidermis with Interactive, Functional and Aesthetic Color Animation (ACM DIS 2017)
ndividuals could also customize aesthetic graphic designs by following the detailed fabrication process to achieve personalized patterns. We propose four different dynamic types of color animation by applying certain voltage to the heating circuitry. With two examples, Email Reminder and Light Control System, we demonstrate how AnimSkin can be integrated into everyday life, and specifically, we show how AnimSkin can benefit areas such as on-skin design, thin-film interface and beauty technology.
[...]
DOI
PDF
Video
Page
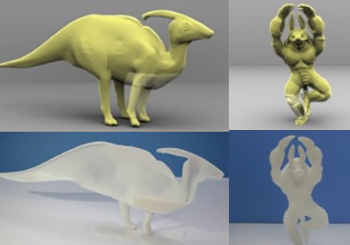
Computing interior support-free structure via hollow-to-fill construction (COMPUTER AND GRAPHICS 2017)
Given a voxelized model and the optimization goal, we first hollow out the model until it becomes a shell, whose thickness is determined by the physical material properties, and then add the support-free structures to optimize the inner surface, and finally refine the inner surface from bottom to top to minimize the optimization objective while maintaining the support-free property.
Furthermore, shape deformation and extra weights are also utilized to optimize the shape for design goals.
[...]
DOI

Personalized food printing for portrait images (COMPUTER AND GRAPHICS 2017)
Our framework automatically converts an arbitrary input image into an optimized printable path to facilitate food printing, while preserving the prominent features of the image.
This is achieved based on two key stages.
First, we apply image abstraction techniques to extract salient image features.
Robust face detection and sketch synthesis are optionally involved to enhance face features for portrait images.
[...]
DOI
PDF
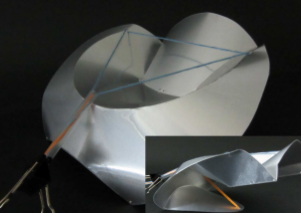
String Actuated Curved Folded Surfaces (ACM SIGGRAPH 2017)
We introduce string actuated curved folded surfaces that can be shaped by pulling a network of strings, thus, vastly simplifying the process of creating such surfaces and making the folding motion an integral part of the design.
Technically, we solve the problem of which surface points to string together and how to actuate them by locally expressing a desired folding path in the space of isometric shape deformations in terms of novel string actuation modes.
[...]
DOI
PDF
Video
Page
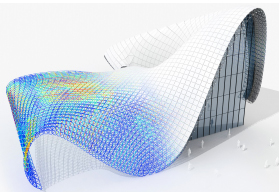
Design and volume optimization of space structures (ACM SIGGRAPH 2017)
We study the design and optimization of statically sound and materially efficient space structures constructed by connected beams.
We propose a systematic computational framework for the design of space structures that incorporates static soundness, approximation of reference surfaces, boundary alignment, and geometric regularity.
To tackle this challenging problem, we first jointly optimize node positions and connectivity through a nonlinear continuous optimization algorithm.
[...]
DOI
PDF
Video
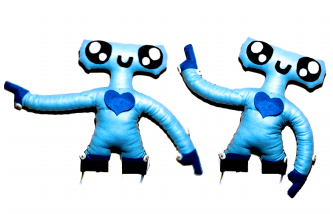
Interactive design of animated plushies (ACM SIGGRAPH 2017)
We present a computational approach to creating animated plushies, soft robotic plush toys specifically-designed to reenact user-authored motions.
Our design process is inspired by muscular hydrostat structures, which drive highly versatile motions in many biological systems.
We begin by instrumenting simulated plush toys with a large number of small, independently-actuated, virtual muscle-fibers. Through an intuitive posing interface, users then begin animating their plushie.
[...]
DOI
PDF
Video
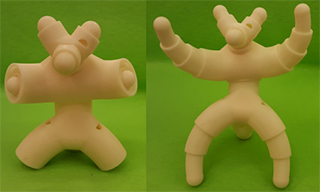
Computational design of telescoping structures (ACM SIGGRAPH 2017)
We present a novel geometric characterization of telescoping curves, and explore how free-form surfaces can be approximated by networks of such curves.
Based on this principle we develop a system for computational design and fabrication which allows users to explore the space of telescoping structures; inputs to our system include user sketches or arbitrary meshes, which are then converted to a curve skeleton. We prototype applications in animation, fabrication, and robotics, using our system to design a variety of both simulated and fabricated examples.
[...]
DOI
PDF
Video
Page
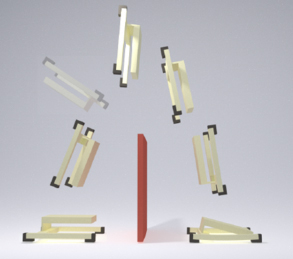
Dynamics-aware numerical coarsening for fabrication design (ACM SIGGRAPH 2017)
In this paper we present Dynamics-Aware Coarsening (DAC) and the Boundary Balanced Impact (BBI) model which allow for the accurate simulation of dynamic, elastic objects undergoing both large scale deformation and frictional contact, at rates up to 79 times faster than state-of-the-art methods.
DAC and BBI produce simulations that are accurate and fast enough to be used (for the first time) for the computational design of 3D-printable compliant dynamic mechanisms.
Thus we demonstrate the efficacy of DAC and BBI by designing and fabricating mechanisms which flip, throw and jump over and onto obstacles as requested.
[...]
DOI
PDF
Video
Page
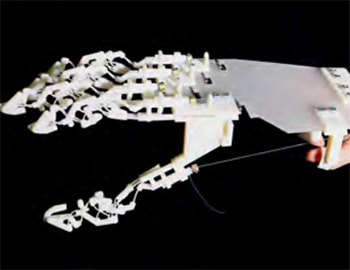
A computational design tool for compliant mechanisms (ACM SIGGRAPH 2017)
We present a computational tool for designing compliant mechanisms. Our method takes as input a conventional, rigidly-articulated mechanism defining the topology of the compliant design.
This input can be both planar or spatial, and we support a number of common joint types which, whenever possible, are automatically replaced with parameterized flexures.
As the technical core of our approach, we describe a number of objectives that shape the design space in a meaningful way, including trajectory matching, collision avoidance, lateral stability, resilience to failure, and minimizing motor torque.
[...]
DOI
PDF
Video
Page
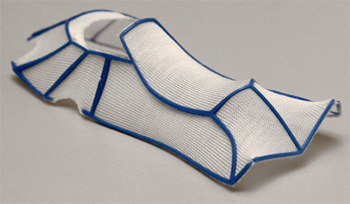
Computational design and automated fabrication of kirchhoff-plateau surfaces (ACM SIGGRAPH 2017)
We propose a computational tool for designing Kirchhoff-Plateau Surfaces---planar rod networks embedded in pre-stretched fabric that deploy into complex, three-dimensional shapes.
While Kirchhoff-Plateau Surfaces offer an intriguing and expressive design space, navigating this space is made difficult by the highly nonlinear nature of the underlying mechanical problem.
In order to tackle this challenge, we propose a user-guided but computer-assisted approach that combines an efficient forward simulation model with a dedicated optimization algorithm in order to implement a powerful set of design tools.
[...]
DOI
PDF
Video
Page

Lightweight structure design under force location uncertainty (ACM SIGGRAPH 2017)
We introduce a lightweight structure optimization approach for problems in which there is uncertainty in the force locations. Such uncertainty may arise due to force contact locations that change during use or are simply unknown a priori.
Given an input 3D model, regions on its boundary where arbitrary normal forces may make contact, and a total force-magnitude budget, our algorithm generates a minimum weight 3D structure that withstands any force configuration capped by the budget.
Our approach works by repeatedly finding the most critical force configuration and altering the internal structure accordingly.
[...]
DOI
PDF
Video
Page
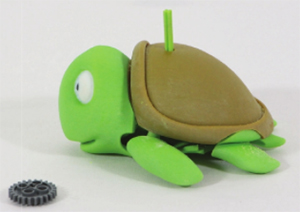
Functionality-aware retargeting of mechanisms to 3D shapes (ACM SIGGRAPH 2017)
We present an interactive design system to create functional mechanical objects. Our computational approach allows novice users to retarget an existing mechanical template to a user-specified input shape.
Our proposed representation for a mechanical template encodes a parameterized mechanism, mechanical constraints that ensure a physically valid configuration, spatial relationships of mechanical parts to the user-provided shape, and functional constraints that specify an intended functionality.
[...]
DOI
PDF
Video
Page
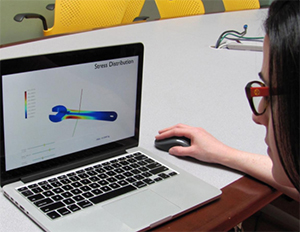
Interactive design space exploration and optimization for CAD models (ACM SIGGRAPH 2017)
In our work, we address these challenges and develop tools that allow interactive exploration and optimization of parametric CAD data. To achieve interactive rates, we use precomputation on an adaptively sampled grid and propose a novel scheme for interpolating in this domain where each sample is a mesh with different combinatorics.
Specifically, we extract partial correspondences from CAD representations for local mesh morphing and propose a novel interpolation method for adaptive grids that is both continuous/smooth and local (i.e., the influence of each sample is constrained to the local regions where mesh morphing can be computed).
[...]
DOI
PDF
Video
Page

CurveUps: shaping objects from flat plates with tension-actuated curvature (ACM SIGGRAPH 2017)
We present a computational approach for designing CurveUps, curvy shells that form from an initially flat state. They consist of small rigid tiles that are tightly held together by two pre-stretched elastic sheets attached to them.
Our method allows the realization of smooth, doubly curved surfaces that can be fabricated as a flat piece. Once released, the restoring forces of the pre-stretched sheets support the object to take shape in 3D.
[...]
DOI
PDF
Video
Page

Interactive Design and Stability Analysis of Decorative Joinery for Furniture (ACM SIGGRAPH 2017)
To perform this stability analysis, we introduce a novel variational static analysis method that addresses shortcomings of the equilibrium method for our task.
Specifically, our method correctly detects sliding instabilities and reports the locations and directions of sliding and hinging failures.
We show that our tool can be used to generate over 100 joints inspired by traditional woodworking and Japanese joinery.
[...]
DOI
PDF
Video
Page
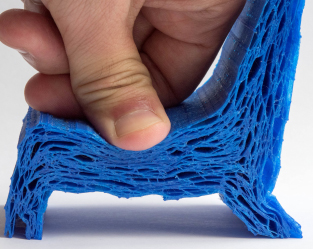
Orthotropic k-nearest foams for additive manufacturing (ACM SIGGRAPH 2017)
In this work, we propose a novel metamaterial with controllable, freely orientable, orthotropic elastic behavior - orthotropy means that elasticity is controlled independently along three orthogonal axes, which leads to materials that better adapt to uneven, directional load scenarios, and offer a more versatile material design primitive.
The fine-scale structures are generated procedurally by a stochastic process, and resemble a foam. The absence of global organization and periodicity allows the free gradation of density, orientation, and stretch, leading to the controllable orthotropic behavior.
The procedural nature of the synthesis process allows it to scale to arbitrarily large volumes at low memory costs.
[...]
DOI
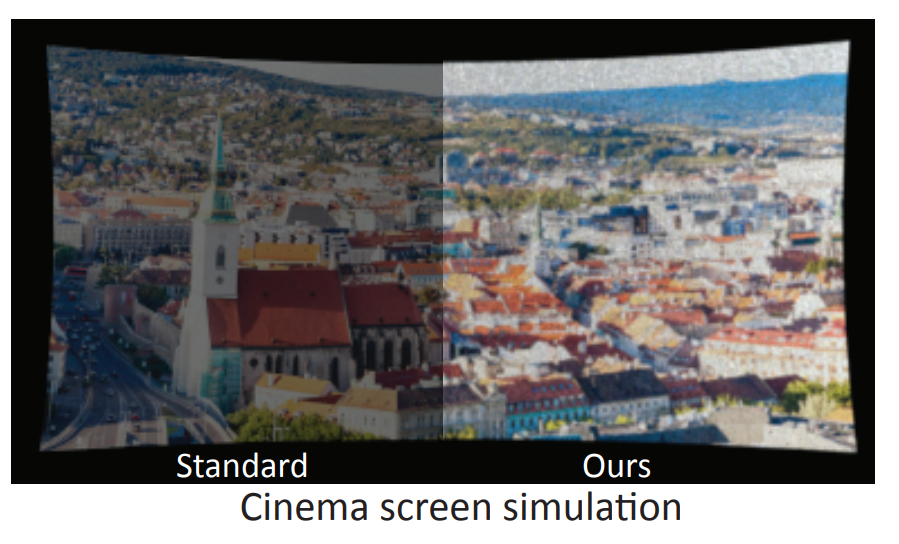
Directional screens (ACM SCF 2017)
The goal of display and screen manufacturers is to design devices or surfaces that maximize the perceived image quality, e.g., resolution, brightness, and color reproduction. Very often, a particular viewer location is not taken into account, and the quality is maximized across all viewing directions. This, however, has significant implications for energy efficiency. There is usually a very wide range of viewing directions (e.g., ceiling, floor, or walls) for which the displayed content does not need to be provided. Ignoring this fact results in energy waste due to a significant amount of light reflected towards these regions. In our work, we propose a new
[...]
DOI
PDF

3D hatching: linear halftoning for dual extrusion fused deposition modeling (ACM SCF 2017)
This work presents halftoning techniques to manufacture 3D objects with the appearance of full grayscale imagery for Fused Deposition Modeling (FDM) printers. While droplet-based dithering is a common halftoning technique, this is not applicable to FDM printing, since FDM builds up objects by extruding material in semicontinuous paths. A set of three methods is presented which apply a linear halftoning principle called 'hatching' to horizontal, vertical and diagonal surfaces.
[...]
DOI
PDF
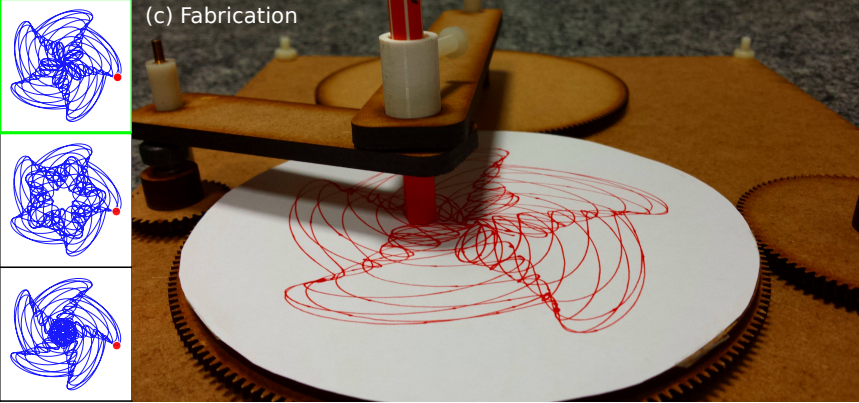
SPIROU: constrained exploration for mechanical motion design (ACM SCF 2017)
Mechanisms are ubiquitous in our daily lives, and the motion they are able to transmit is often a critical part of their function. While fabrication from a virtual model can be done relatively easily in a fab lab, creating or customizing a model according to functional specifications remains a challenging task. We focus on a fascinating application: drawing machines. Devices such as the popular Spirograph can easily generate intricate patterns from an assembly of simple mechanical elements. Designing such machines, however, is made particularly tedious by the complex influence each configuration parameter has
[...]
DOI
PDF
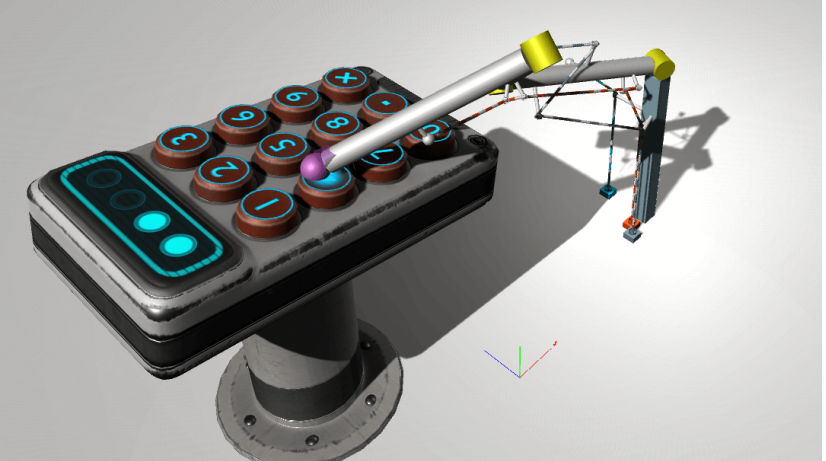
Task-based design of cable-driven articulated mechanisms (ACM SCF 2017)
We present a framework for the automatic design of articulated cable-driven mechanisms performing push andpick-and-place tasks. Provided an initial topology and task specification, our system optimizes the morphology and cable mechanisms such that the resulting mechanism can perform the desired task successfully. Optimizing for multiple tasks and multiple cables simultaneously is possible with our framework. At the core of our approach is an optimization algorithm that analyzes the kinematics of the design to evaluate the mechanism's ability to perform the task. Dynamical attributes, such as
[...]
DOI
PDF
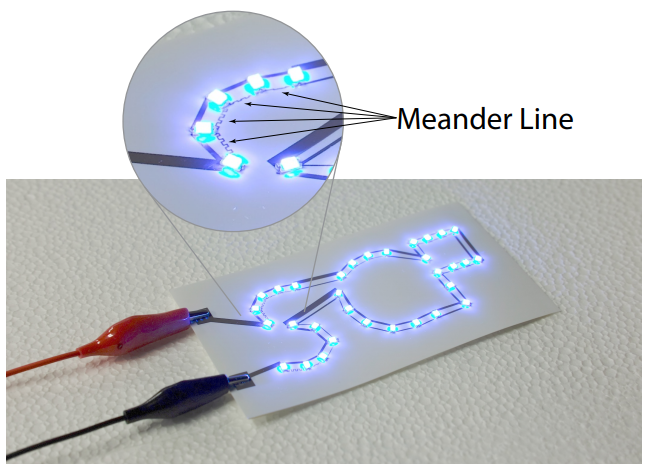
LightTrace: auto-router for designing LED based applications with conductive inkjet printing (ACM SCF 2017)
The combination of graphic design and printable electronic circuits has brought a large variety of customized elements to create interactive applications. The designers aim to focus on the creative and aesthetic aspects when crafting such applications. However, current technology forces designers to consider the discouraging and complicated electrical behavior of the related circuits. Even a simple application as activating a group of LEDs by means of conductive ink presents specific challenges. For instance, given the relatively high resistance of conductive ink, it is difficult to
[...]
DOI
PDF

Turning coders into makers: the promise of embedded design generation (ACM SCF 2017)
As personal fabrication becomes increasingly accessible and popular, a larger number of makers, many without formal training, are dabbling in embedded and electronics design. However, existing general-purpose, board-level circuit design techniques do not share desirable properties of modern software development, like rich abstraction layers and automated compiler checks, which facilitate powerful tools that ultimately lower the barrier to entry for programming, by allowing a higher level of design-separating specification from implementation-and providing
[...]
DOI
PDF
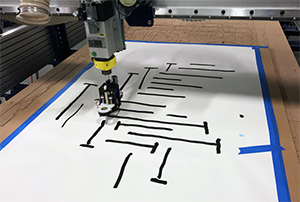
Direct and immediate drawing with CNC machines (ACM SCF 2017)
We investigate how the immediate control of computer numerical control (CNC) machines can narrow the design-fabrication gap and combine manual art practice with digital fabrication.
LINC (Live Interactive Numeric Control) is a sketch-based digital design tool for authoring 2D or 3D artworks in near-real time.
To use LINC, users draw strokes which are then executed in one of three modes---static, manual, or as soon as possible---by either a large-scale or desktop-sized modified CNC router.
We evaluate LINC through a study with eight artists.
[...]
DOI
PDF

Bend-a-rule: a fabrication-based workflow for 3D planar contour acquisition (ACM SCF 2017)
Bend-a-rule is a physical tool and workflow that enables the robust acquisition of planar contours of 3D shape. Our work exemplifies the design of physical artifacts that subsequently aid in digital design and fabrication. Bend-a-rule is a ruler, fabricated by laser-cutting a periodic pattern on a rigid board.
The ruler has unidirectional flexibility, and readily bends to conform to the shape of curved planar contours on physical 3D objects.
We present a novel workflow, by which this curved planar contour can be digitally acquired from a single image of the physical ruler. The acquired contour is then used to design laser-cut accessory shapes that attach to physcial 3D objects along the digitally acquired contour.
[...]
DOI
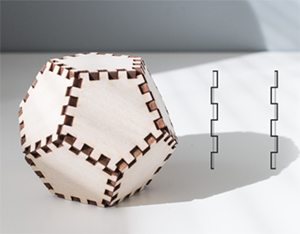
Joinery: Parametric Joint Generation for Laser Cut Assemblies (ACM Creativity and Cognition 2017)
Laser cutting is widely used by industrial designers and mechanical engineers as a rapid modeling tool. However, designing and fabricating laser cut assemblies can be a complex and tedious process, especially for novice designers.
Through our research, we developed Joinery, a parametric joint generation tool for laser cut assemblies. Through Joinery, designers simply define connections between parts of an assembly, while the system generates the joints.
[...]
DOI
PDF
Page

Facade: Auto-generating Tactile Interfaces to Appliances (ACM CHI 2017)
We introduce Facade—a crowdsourced fabrication pipeline to help blind people inde¬ pendently make physical interfaces accessible by adding a 3D printed augmentation of tactile buttons overlaying the original panel.
Facade users capture a photo of the appliance with a readily available fiducial marker (a dollar bill) for recovering size information.
This image is sent to multiple crowd workers, who work in parallel to quickly label and describe elements of the interface.
Facade then generates a 3D model for a layer of tactile and pressable buttons that fits over the original controls.
[...]
DOI
PDF
Video
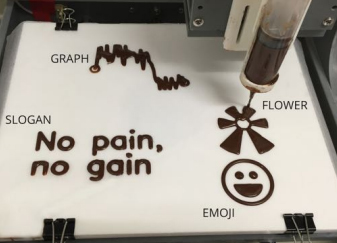
EdiPulse: Investigating a Playful Approach to Self-monitoring through 3D Printed Chocolate Treats (ACM CHI 2017)
We introduce EdiPulse a novel system that creates activity treats to offer playful reflections on everyday physical activity through the appealing medium of chocolate.
EdiPulse translates self-monitored data from physical activity into small 3D printed chocolate treats.
Determination, Affection, and Co-experience. We conclude by highlighting key implications of our work for future playful food-based technology design in supporting the experience of being physically active.
[...]
DOI
PDF
Video
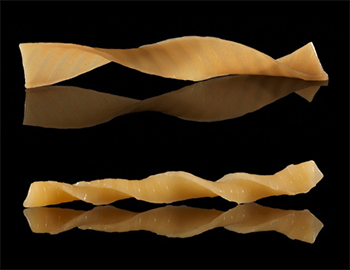
Transformative Appetite (ACM CHI 2017)
We developed a concept of transformative appetite, where edible 2D films made of common food materials (protein, cellulose or starch) can transform into 3D food during cooking.
This transformation process is triggered by water adsorption, and it is strongly compatible with the 'flat packaging' concept for substantially reducing shipping costs and storage space.
To develop these transformable foods, we performed material-based design, established a hybrid fabrication strategy, and conducted performance simulation.
[...]
DOI
PDF
Page
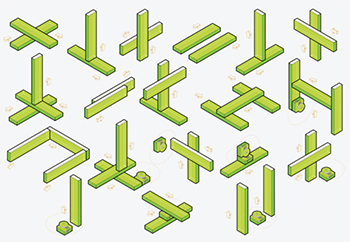
Cardboard Machine Kit: Modules for the Rapid Prototyping of Rapid Prototyping Machines (ACM CHI 2017)
We propose a novel set of modules, the Cardboard Machine Kit, for the construction of digital fabrication machines.
These open-source modules are implemented using cardboard frames, stepper motors, and networked electronics controlled through a Python library.
We evaluated the kit both through machine building workshops and by studying the usage of the kit in the wild. [...]
DOI
Video
Page
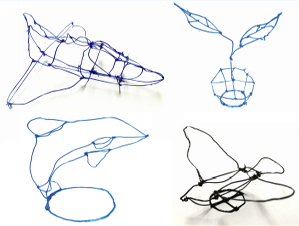
WireDraw: 3D Wire Sculpturing Guided with Mixed Reality (ACM CHI 2017)
We present a mixed reality system, called `WireDraw', to immersively guide the 3D drawing for easy wire sculpturing.
The system design is based on novel 3D drawing principles and the subsequent optimization, making the stroke sequence of the wire model drawable and easy to draw.
On-the-fly edits on unsatisfactory strokes are also allowed for creative design. [...]
DOI
Paper
Video

Printflatables: Printing Human-Scale, Functional and Dynamic Inflatable Objects (ACM CHI 2017)
Printflatables is a design and fabrication system for human-scale, functional and dynamic inflatable objects.
We use inextensible thermoplastic fabric as the raw material with the key principle of introducing folds and thermal sealing.
Upon inflation, the sealed object takes the expected three dimensional shape. [...]
DOI
Paper
Video

Pineal: Bringing Passive Objects to Life with Embedded Mobile Devices (ACM CHI 2017)
To mitigate this, we created Pineal, a design tool that lets end-users: (1) modify 3D models to include a smart watch or phone as its heart; (2) specify high-level interactive behaviours through visual programming; and (3) have the phone or watch act out such behaviours as the objects' "smarts".
Furthermore, a series of prototypes show how Pineal exploits mobile sensing and output, and automatically generates 3D printed form-factors for rich, interactive, objects. [...]
DOI
Paper
Video
Page
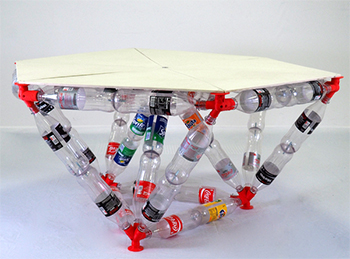
TrussFab: Fabricating Sturdy Large-Scale Structures on Desktop 3D Printers (ACM CHI 2017)
We present TrussFab, an integrated end-to-end system that allows users to fabricate large scale structures that are sturdy enough to carry human weight.
TrussFab achieves the large scale by complementing 3D print with plastic bottles. It does not use these bottles as "bricks" though,
but as beams that form structurally sound node-link structures, also known as trusses, allowing it to handle the forces resulting from scale and load. [...]
DOI
Paper
Video
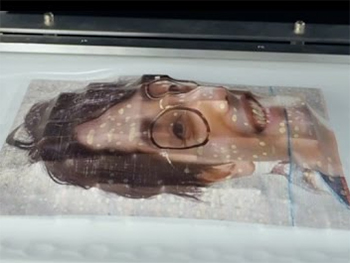
ProtoMold: An Interactive Vacuum Forming System for Rapid Prototyping (ACM CHI 2017)
We propose a novel fabrication machine called ProtoMold, which uses interactive vacuum forming system for rapid prototyping.
ProtoMold combines a dynamical shape-changing surface that consists of 12 × 8 linear actuators and a vacuum forming system.
According to the shape of the surface, this system can mold various 2.5 dimensional objects quickly. [...]
DOI
Video
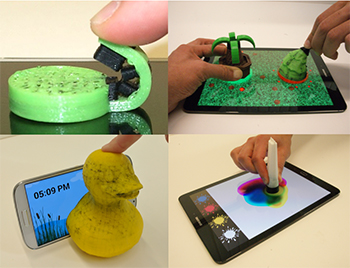
Flexibles: Deformation-Aware 3D-Printed Tangibles for Capacitive Touchscreens (ACM CHI 2017)
We introduce Flexibles: 3D-printed flexible tangibles that are deformation-aware and operate on capacitive touchscreens.
Flexibles add expressive deformation input to interaction with on-screen tangibles.
Based on different types of deformation mapping, we contribute a set of 3D-printable mechanisms that capture pressing, squeezing, and bending input with multiple levels of intensities. [...]
DOI
Paper
Video
Page
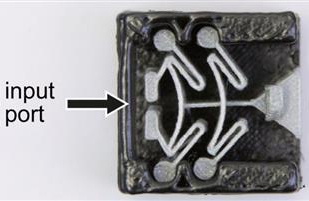
Digital Mechanical Metamaterials (ACM CHI 2017)
We explore how to embody mechanical computation into 3D printed objects, i.e., without electronic sensors, actuators, or controllers typically used for this purpose.
A key benefit of our approach is that the resulting objects can be 3D printed in one piece and thus do not require assembly. [...]
DOI
Paper
Video
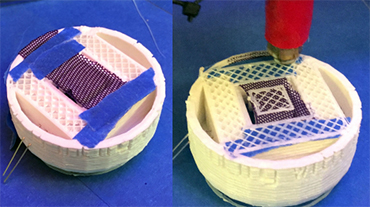
Stretching the Bounds of 3D Printing with Embedded Textiles (ACM CHI 2017)
Combining 3D printing and textiles opens up new opportunities for rapidly creating rigid objects with embedded flexibility as well as soft
materials imbued with additional functionality. We introduce a suite of techniques for integrating 3D printing with textiles
during the printing process, opening up a new design space that takes inspiration from both fields. [...]
DOI
Paper
Video

Electrick: Low-Cost Touch Sensing Using Electric Field Tomography (ACM CHI 2017)
We show that our technique is compatible with commonplace manufacturing methods, such as spray/brush coating,
vacuum forming, and casting/molding enabling a wide range of possible uses and outputs. Our technique can also
bring touch interactivity to rapidly fabricated objects, including those that are laser cut or 3D printed. [...]
DOI
Video
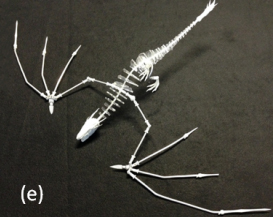
WireFab: Mix-Dimensional Modeling and Fabrication for 3D Mesh Models (ACM CHI 2017)
The WireFab is designed to allow the user to choose how to best preserve the fidelity of the
topological structure and articulation motion while selectively maintaining the fidelity of the geometric
appearance. Compared to 3D-printing based high-fidelity fabrication systems, WireFab increases prototyping
speed by ignoring unnecessary geometric details while preserving structural integrity and articulation motion. [...]
DOI
Video
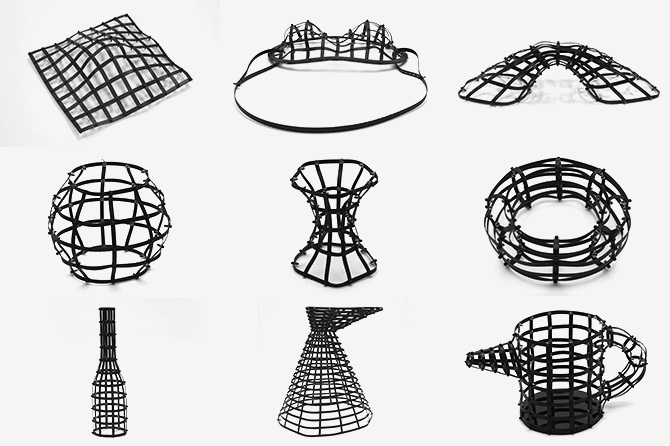
WeaveMesh: A Low-Fidelity and Low-Cost Prototyping Approach for 3D Models Created by Flexible Assembly (ACM CHI 2017)
To meet the increasing requirements of HCI researchers who are prototyping a variety of forms to create novel interfaces under a ubiquitous situation, we present WeaveMesh, a low-fidelity and low-cost rapid prototyping system that produces 3D objects in a mesh structure. Inspired by hand-weaving craft, WeaveMesh supports a highly customizable software platform, which is applicable for simulating and facilitating freeform surface constructions composed of woven [...]
DOI
PDF

infoTexture: Incremental Interfaces on Mesh Prototyping (ACM CHI EA 2017)
In recent years, the rapid prototyping of 3D objects has been a popular research, which mainly focusing on the fabrication process of prototypical structures and shapes. However, relatively little research has examined the surface texture of 3D models. To meet the increasing requirements of HCI researchers who are prototyping 3D forms with information on the surfaces to build multivariate interfaces, we present infoTexture, a novel rapid prototyping system that produces 3D objects both in a mesh structure and covered by a surface texture simultaneously. [...]
DOI
PDF

Digital Fabrication Techniques for Cultural Heritage: A Survey (EUROGRAPHICS 2017)
This survey overviews the various fabrication technologies, discussing their strengths, limitations and costs. Various successful uses of 3D printing in the Cultural Heritage are analysed, which should also be useful for other application contexts. We review works that have attempted to extend fabrication technologies in order to deal with the specific issues in the use of digital fabrication in the Cultural Heritage. Finally, we also propose areas for future research. [...]
DOI
Paper
Page
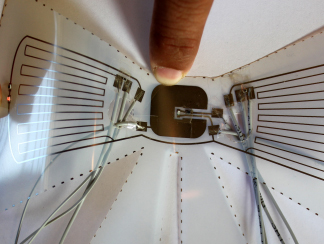
Flexy: Shape-Customizable, Single-Layer, Inkjet Printable Patterns for 1D and 2D Flex Sensing (ACM TEI 2017)
We contribute a new technique for fabricating highly customized 1D and 2D flex
sensing surfaces on thin and flexible substrates. It enables designers and makers to easily,
quickly and inexpensively realize thin physical objects in custom shapes with an embedded deformation sensor.
The deformation sensor is digitally designed and then fabricated with a
single layer of conductive material in a single pass, using an off-the-shelf inkjet printer. [...]
DOI
Paper
Page
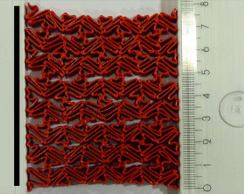
New possibilities using additive manufacturing with materials that are difficult to process and with complex structures (IOPScience 2017)
We illustrate process developments with an account of the production of printer parts to cope with polymer fillers that are hard and abrasive; new nozzles with ruby inserts designed for such materials are durable and can be used to print boron carbide composites. As with other materials, complex parts can be printed using boron carbide composites with fine structures, such as screw threads and labels to identify materials. [...]
DOI
2016
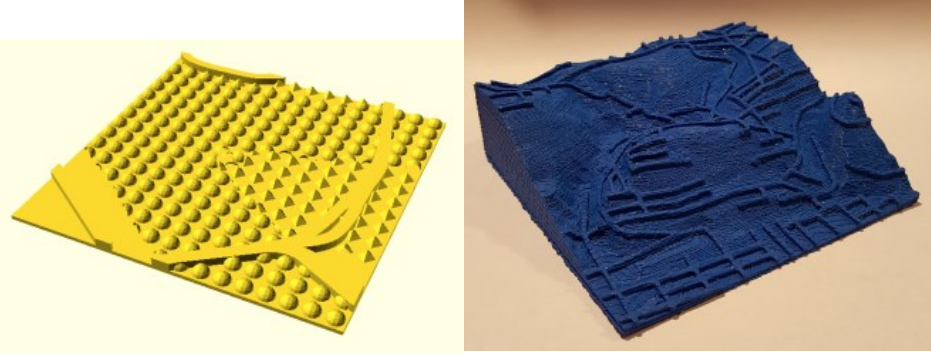
Customizable 3D Printed Tactile Maps as Interactive Overlays (ACM ASSETS 2016)
Though tactile maps have been shown to be useful tools for visually impaired individuals, their availability has been limited by manufacturing and design costs. In this paper, we present a system that uses 3D printing to (1) make tactile maps more affordable to produce, (2) allow visually impaired individuals to independently design and customize maps, and (3) provide interactivity using widely available mobile devices. Our system consists of
[...]
DOI
PDF
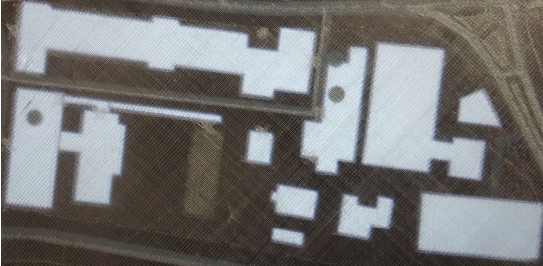
LucentMaps: 3D Printed Audiovisual Tactile Maps for Blind and Visually Impaired People (ACM ASSETS 2016)
Tactile maps support blind and visually impaired people in orientation and to familiarize with unfamiliar environments. Interactive approaches complement these maps with auditory feedback. However, commonly these approaches focus on blind people. We present an approach which incorporates visually impaired people by visually augmenting relevant parts of tactile maps. These audiovisual tactile maps can be used in conjunction with common
[...]
DOI
PDF

Uncovering Challenges and Opportunities for 3D Printing Assistive Technology with Physical Therapists (ACM ASSETS 2016)
Physical therapists have a history of modifying and making assistive technology (AT) to fit the unique needs of their patients. However, lack of materials, time, and access to training can restrict what they can create. While 3D printing has the opportunity to empower physical therapists to develop highly customized, economical, and timely assistive technology; little is known about the feasibility of using 3D printing in a clinical setting,
[...]
DOI
PDF
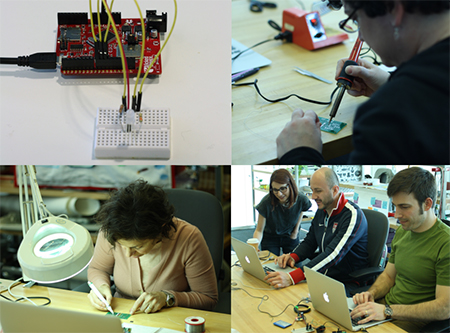
Engaging Amateurs in the Design, Fabrication, and Assembly of Electronic Devices (ACM DIS 2016)
We describe a six-session workshop in which eight participants made wifi-connected devices through the design and fabrication of custom printed circuit boards. We explore the implications of using components and processes analogous to those in commercial products, as opposed to the limited set of higher-level building blocks found in toolkits for hobbyist electronics. We highlight unique advantages and challenges of a personal fabrication approach. We explore the role of attitudes in identifying a suitable audience for these activities.
[...]
DOI
PDF

Productive Frictions: Moving from Digital to Material Prototyping and Low-Volume Production for Design Research (ACM DIS 2016)
We focus on the lessons we learned from the challenges and design opportunities that arose in moving from digital processes to ceramic processes. We reflected on these lessons and developed thematic notions we refer to as frictions. These include shifting constraints, naive expertise, manual automation, and dynamic materiality. The contributions of this paper are new design insights into the combination of digital and material processes for studio based prototyping and low-volume production and adds to the emerging relevance of digital fabrication, physical fabrication, and physical materials to interaction design and HCI research.
[...]
DOI
Page
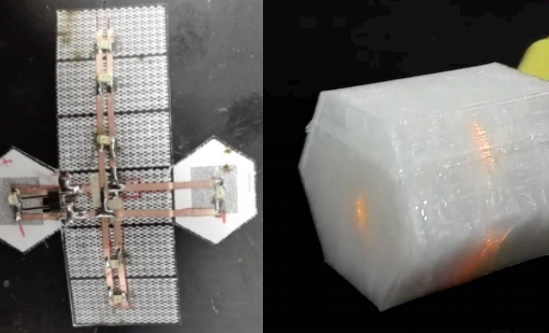
3D Folded PrintGami: Transforming Passive 3D Printed Objects to Interactive by Inserted Paper Origami Circuits (ACM DIS 2016)
In this paper, we introduce a process of integrating paper circuit into a 3D printed object, combining two universal fabrication techniques, 3D printing and paper crafting: 1) design a hollow 3D model, 2) construct circuits on the 2D planar cutout of this figure, 3) pause 3D printing to insert folded circuits in, 4) resume to continue printing. We empower makers and tinkerers to employ pervasive technology to build interactive 3D objects without hacking machine, obtaining professional utilities, or buying expensive materials.
[...]
DOI
Page
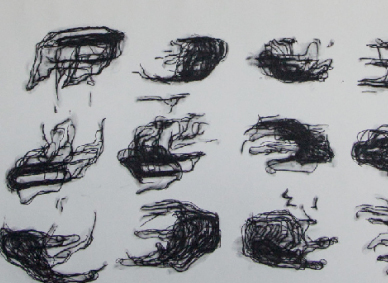
Probing the Potential of Post-Anthropocentric 3D Printing (ACM DIS 2016)
We describe how existing designs can be seen as anthropocentric, framing the human maker as visionary and commander of passive machines and materials. We then present an alternative system for 3D printing, called Redeform, which explores how a post-anthropocentric framing of makers as collaborators with machines and materials changes the design of 3D printers. We place our system within a lineage of performances that have explored relationships between humans and nonhumans since the 1950s. In doing so, we explore and speculate on the opportunities for operationalizing post-anthropocentric theories within the specific context of the maker movement.
[...]
DOI
PDF
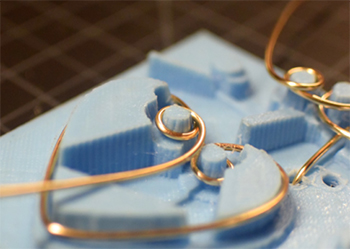
ProxyPrint: Supporting Crafting Practice through Physical Computational Proxies (ACM DIS 2016)
We investigate how DF artifacts can function as static intermediary tools, which we term proxies, to support crafting practice. We focus on the wire-wrapping process where physical wire is bent into complex shapes and build DF fixtures to aid with construction and fabrication. We explore how these proxies can be generated to provide users with different levels-of-assistance and evaluate how these proxies affect the making process. We show that our proxies affect quality and speed and yield different making experiences between novice and expert craftspeople.
[...]
DOI
PDF
Video
Page
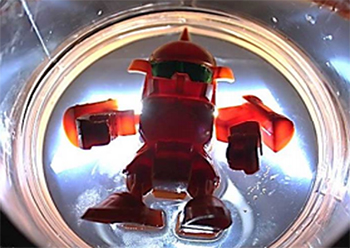
FusePrint: A DIY 2.5D Printing Technique Embracing Everyday Artifacts (ACM DIS 2016)
Based on our polynomial model on 2.5D resin printing, we developed the design interface of FusePrint, which allows users to design the printed shapes using physical objects as references, generates projection patterns, and notifies users when to place the objects in the resin during the printing process. Our workshops suggested that FusePrint is easy to learn and use, provides a greater level of interactivity, and could be useful for a wide range of applications domains including: mechanical fabrication, wearable accessory, toys, interactive systems, etc.
[...]
DOI
PDF
Video
Page

Computational multicopter design (SIGGRAPH Asia 2016)
We present an interactive system for computational design, optimization, and fabrication of multicopters. Our computational approach allows non-experts to design, explore, and evaluate a wide range of different multicopters. We provide users with an intuitive interface for assembling a multicopter from a collection of components (e.g., propellers, motors, and carbon fiber rods). [...]
DOI
Paper
Video
Page
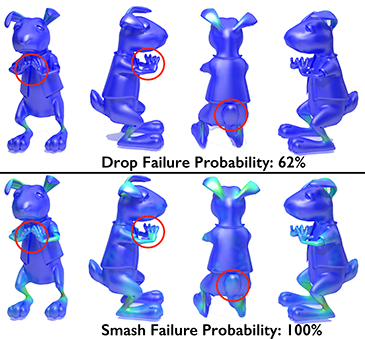
Stochastic structural analysis for context-aware design and fabrication (SIGGRAPH Asia 2016)
In this paper we propose failure probabilities as a semantically and mechanically meaningful measure of object fragility. We present a stochastic finite element method which exploits fast rigid body simulation and reduced-space approaches to compute spatially varying failure probabilities. We use an explicit rigid body simulation to emulate the real-world loading conditions an object might experience, including persistent and transient frictional contact, while allowing us to combine several such scenarios together. [...]
DOI
Paper
Video
Page

Fabrication of freeform objects by principal strips (SIGGRAPH Asia 2016)
Our novel method uses orthogonal principal strips to fabricate objects whose boundary consists of freeform surfaces. This approach not only lends an artistic touch to the appearance of objects, but also provides directions for reinforcement, as the surface is mostly bent along the lines of curvature. Moreover, it is unnecessary to adjust the bending of these orthogonal strips during the construction process, which automatically reforms the design shape as if it is memorized, provided the strips possess bending rigidity. [...]
DOI
Paper
Video
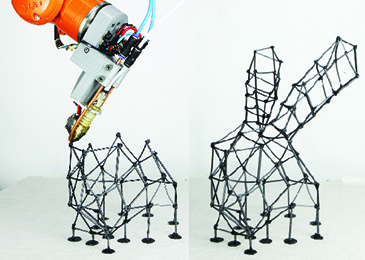
FrameFab: robotic fabrication of frame shapes (SIGGRAPH Asia 2016)
In this paper, we present a novel algorithm to generate a feasible fabrication sequence for general frame shapes. To solve this non-trivial combinatorial problem, we develop a divide-and-conquer strategy that first decomposes the input frame shape into stable layers via a constrained sparse optimization model. Then we search a feasible sequence for each layer via a local optimization method together with a backtracking strategy. [...]
DOI
Paper
Page

FlexMolds: automatic design of flexible shells for molding (SIGGRAPH Asia 2016)
We present FlexMolds, a novel computational approach to automatically design flexible, reusable molds that, once 3D printed, allow us to physically fabricate, by means of liquid casting, multiple copies of complex shapes with rich surface details and complex topology. The approach to design such flexible molds is based on a greedy bottom-up search of possible cuts over an object, evaluating for each possible cut the feasibility of the resulting mold. [...]
DOI
Paper
Video
Page

Stretchis: Fabricating Highly Stretchable User Interfaces (ACM UIST 2016)
We use Polydimethylsiloxan (PDMS) as the base material for a Stretchi and show how to embed stretchable touch and proximity sensors and stretchable electroluminescent displays.
Stretchis can be ultra-thin (≈ 200μm), flexible, and fully customizable, enabling non-expert makers to add interaction to elastic physical objects, shape-changing surfaces, fabrics, and the human body.
[...]
DOI
PDF
Video
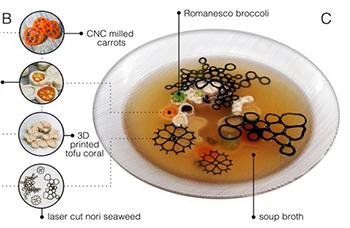
Digital Gastronomy: Methods & Recipes for Hybrid Cooking (ACM UIST 2016)
We envision a culture of Digital Gastronomy that enhances traditional cooking
with new interactive capabilities, rather than replacing the chef with an autonomous machine.
Thus, we deploy existing digital fabrication instruments in traditional kitchen and integrate
them into cooking via hybrid recipes. This concept merges manual and digital procedures,
and imports parametric design tools into cooking,
allowing the chef to personalize the tastes, flavors, structures and aesthetics of dishes. [...]
DOI
Paper
Video
Page
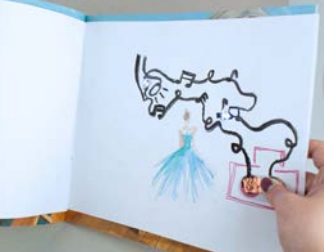
Aesthetic Electronics: Designing, Sketching, and Fabricating Circuits through Digital Exploration (ACM UIST 2016)
Ellustrate guides users through the fabrication and debugging process,
easing the task of practical circuit creation while supporting designers' aesthetic decisions
throughout the circuit authoring workflow. In a formal user study, we demonstrate how
Ellustrate enables a new electronic design conversation that combines electronics, materials, and visual aesthetic concerns. [...]
DOI
Paper
Video

Mobile Fabrication (ACM UIST 2016)
We present an exploration into the future of fabrication, in particular the vision of mobile fabrication, which we define as "personal fabrication on the go".
From our experience with the prototypes we derive hardware requirements to make mobile fabrication also technically feasible. [...]
DOI
Paper
Video
Page
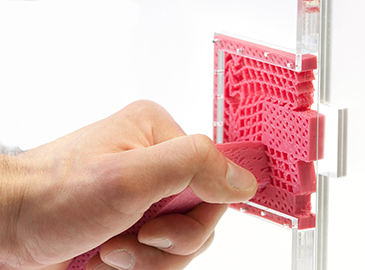
Metamaterial Mechanisms (ACM UIST 2016)
In order to allow users to create metamaterial mechanisms efficiently we implemented a specialized 3D editor. It allows users to place different types of cells, including the shear cell, thereby allowing users to add mechanical functionality to their objects. To help users verify their designs during editing, our editor allows users to apply forces and simulates how the object deforms in response. [...]
DOI
Paper
Video
Page
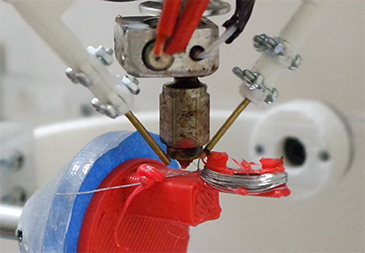
A 3D Printer for Interactive Electromagnetic Devices (ACM UIST 2016)
We introduce a new form of low-cost 3D printer to print interactive electromechanical objects with wound in place coils.
At the heart of this printer is a mechanism for depositing wire within a five degree of freedom (5DOF)
fused deposition modeling (FDM) 3D printer. Copper wire can be used with this mechanism to form coils which
induce magnetic fields as a current is passed through them. [...]
DOI
Paper
Video
Page
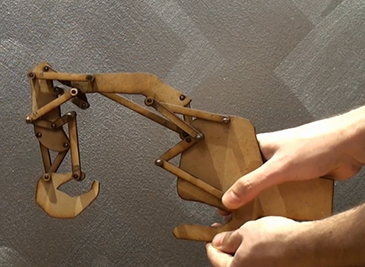
ChaCra: an interactive design system for rapid character crafting (ACM SCA 2016)
We propose an interactive design system for rapid crafting of planar mechanical characters.
Our method combines the simplicity of sketch-based modeling with the ease of defining motion
through extreme poses. In order to translate digital designs into fabrication-ready
descriptions, our method automatically
computes the mechanical structure that makes the characters move as desired. [...]
DOI
Paper
Video
Page
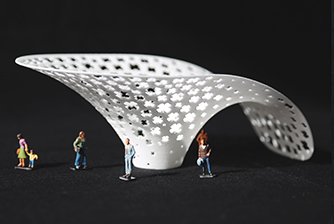
Stenciling: Designing Structurally-Sound Surfaces with Decorative Patterns (ACM SGP 2016)
We present a novel method to design shells with artistic cutouts in a manner that produces
a stable final result. The process of stenciling, removing material with a fixed shape,
is a particularly appealing way to introduce a decorative pattern
into the design of architectural structures, furniture, or household objects. [...]
DOI
Paper
Video
Page

Printed Perforated Lampshades for Continuous Projective Images (ACM SIGGRAPH 2016)
We present a technique for designing 3D-printed perforated lampshades that project
continuous grayscale images onto the surrounding walls. Given the geometry of the
lampshade and a target grayscale image, our method computes a distribution of tiny
holes over the shell, such that the combined footprints of the
light emanating through the holes form the target image on a nearby diffuse surface. [...]
DOI
Paper
Video
Page
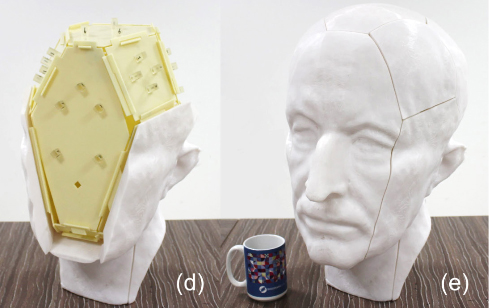
CofiFab: coarse-to-fine fabrication of large 3D objects (ACM SIGGRAPH 2016)
This paper presents CofiFab, a coarse-to-fine 3D fabrication solution, combining 3D printing and 2D laser cutting for cost-effective fabrication of large objects at lower cost and higher speed. Our key approach is to first build coarse internal base structures within the given 3D object using laser cutting, and then attach thin 3D-printed parts, as an external shell, onto the base to recover the fine surface details. [...]
DOI
Paper
Video
Page
Connected fermat spirals for layered fabrication (ACM SIGGRAPH 2016).
We develop a new kind of "space-filling" curves, connected Fermat spirals, and show their compelling properties as a tool path fill pattern for layered fabrication. Unlike classical space-filling curves such as the Peano or Hilbert curves, which constantly wind and bind to preserve locality, connected Fermat spirals are formed mostly by long, low-curvature paths. This geometric property, along with continuity, influences the quality and efficiency of layered fabrication.
DOI
Paper
Video
Page
Procedural voronoi foams for additive manufacturing (ACM SIGGRAPH 2016)
In this paper we propose to study procedural, aperiodic microstructures inspired by Voronoi open-cell foams. The absence of regularity affords for a simple approach to grade the foam geometry --- and thus its mechanical properties --- within a target object and its surface. Rather than requiring a global optimization process, the microstructures are directly generated to exhibit a specified elastic behavior. [...]
DOI
Page
Slides
Printing arbitrary meshes with a 5DOF wireframe printer (ACM SIGGRAPH 2016)
We formalize the collision avoidance problem using a directed graph, and propose an algorithm that finds a locally minimal set of constraints on the order of edges that guarantees there will be no collisions. Then a second algorithm orders the edges so that the printing progresses smoothly. Though meshes do exist that still cannot be printed, our method prints a wide range of models that previous methods cannot, and it provides a fundamental enabling algorithm for future development of wireframe printing. [...]
DOI
Paper
Video
Page
Designing structurally-sound ornamental curve networks (ACM SIGGRAPH 2016)
We present a computational tool for designing ornamental curve networks---structurally-sound physical surfaces with user-controlled aesthetics. In contrast to approaches that leverage texture synthesis for creating decorative surface patterns, our method relies on user-defined spline curves as central design primitives. [...]
DOI
Paper
Video
Page

Synthesis of filigrees for digital fabrication (ACM SIGGRAPH 2016)
Filigrees are thin patterns found in jewelry, ornaments and lace fabrics. They are often formed of repeated base elements manually composed into larger, delicate patterns. Digital fabrication simplifies the process of turning a virtual model of a filigree into a physical object. However, designing a virtual model of a filigree remains a time consuming and challenging task. The difficulty lies in tightly packing together the base elements while covering a target surface. [...]
DOI
Paper
Video
Page
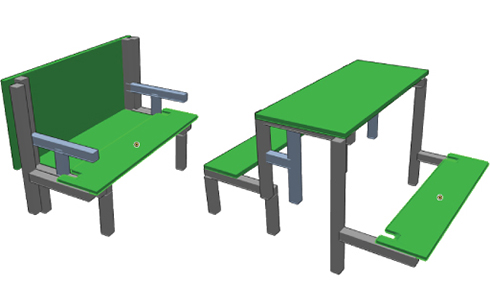
Computational design of reconfigurables (ACM SIGGRAPH 2016)
A reconfigurable is an object or collection of objects whose transformation between various states defines its functionality or aesthetic appeal. For example, consider a mechanical assembly composed of interlocking pieces, a transforming folding bicycle, or a space-saving arrangement of apartment furniture. [...]
DOI
Paper
Video
Page

Acoustic voxels: computational optimization of modular acoustic filters (ACM SIGGRAPH 2016)
A reconfigurable is an object or collection of objects whose transformation between various states defines its functionality or aesthetic appeal. For example, consider a mechanical assembly composed of interlocking pieces, a transforming folding bicycle, or a space-saving arrangement of apartment furniture. [...]
DOI
Paper
Video
Page

Computational thermoforming (ACM SIGGRAPH 2016)
We propose a method to fabricate textured 3D models using thermoforming. Differently from industrial techniques, which target mass production of a specific shape, we propose a combined hardware and software solution to manufacture customized, unique objects. Our method simulates the forming process and converts the texture of a given digital 3D model into a pre-distorted image that we transfer onto a plastic sheet. During thermoforming, the sheet deforms to create a faithful physical replica of the digital model. [...]
DOI
Paper
Video
Page

Balancing 3D models with movable masses (EUROGRAPHICS 2016, Proceedings of VMV'16)
e present an algorithm to balance 3D printed models using movable embedded masses.
As input, the user provides a 3D model together with the desired suspension, standing,
and immersion objectives. Our technique then determines the placement and suitable sizing
of a set of hollow capsules with embedded metallic spheres,
leveraging the resulting multiple centers of mass to simultaneously satisfy the combination of these objectives. [...]
DOI
Paper
Video
Page

Buoyancy Optimization for Computational Fabrication (EUROGRAPHICS 2016)
This paper introduces a design and fabrication pipeline for creating floating forms. Our method optimizes for buoyant equilibrium and stability of complex 3D shapes, applying a voxel-carving technique to control the mass distribution.
The resulting objects achieve a desired floating pose defined by a user-specified waterline height and orientation. [...]
DOI
Paper
Video
Page
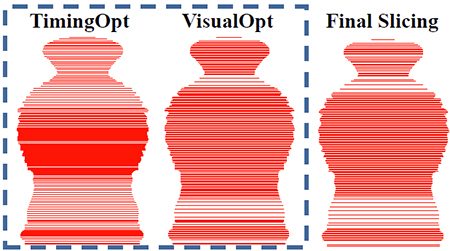
Saliency-Preserving Slicing Optimization for Effective 3D Printing (EUROGRAPHICS 2016)
We present an adaptive slicing scheme for reducing the manufacturing time for 3D printing systems.
Based on a new saliency-based metric, our method optimizes the thicknesses of slicing layers to
save printing time and preserve the visual quality of the printing results. We formulate the problem as a
constrained optimization and compute the slicing result via a two-step optimization scheme. [...]
DOI
Paper
Video
Page

DefSense: Computational Design of Customized Deformable Input Devices (ACM CHI 2016)
We propose to embed piezoresistive sensing elements into flexible 3D printed objects. These sensing elements are then utilized to recover rich and natural user interactions at runtime. Designing such objects manually is a challenging and hard problem for all but the simplest geometries and deformations. Our method simultaneously optimizes the internal routing of the sensing elements and computes a mapping from low-level sensor readings to user-specified outputs in order to minimize reconstruction error. [...]
DOI
Paper
Video
Page
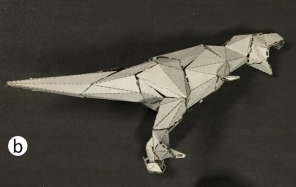
CardBoardiZer: Creatively Customize, Articulate and Fold 3D Mesh Models (ACM CHI 2016)
This paper presents CardBoardiZer, a rapid cardboard based prototyping platform that allows everyday sculptural
3D models to be easily customized, articulated and folded. We develop a building platform to allow the designer to
1) import a desired 3D shape, 2) customize articulated partitions into planar or volumetric foldable patterns,
and 3) define rotational movements between partitions. [...]
DOI
Paper
Video
Page
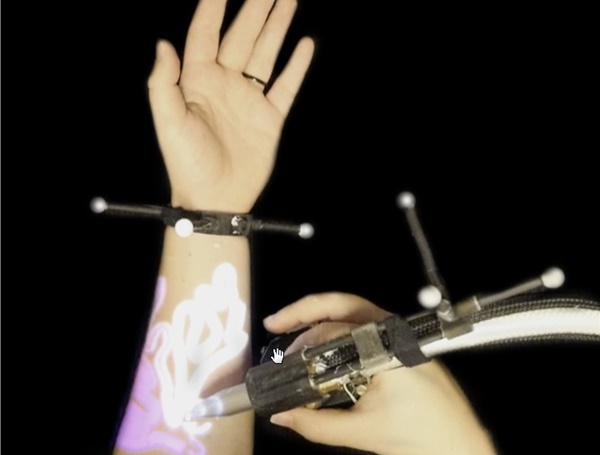
ExoSkin: On-Body Fabrication (ACM CHI 2016)
We present ExoSkin, a hybrid fabrication system for designing and printing digital artifacts directly on the body. ExoSkin utilizes a custom built fabrication machine designed specifically for on-body printing. ExoSkin utilizes a custom built fabrication machine designed specifically for on-body printing. We demonstrate the potential of on-body fabrication with a set of sample workflows, and share feedback from initial observation sessions. [...]
DOI
Paper
Video
Page

The Hybrid Bricolage: Bridging Parametric Design with Craft through Algorithmic Modularity (ACM CHI 2016)
Our hypothesis is that the arrangement of parametric design in modular representation, in the form of a catalog, can assist makers unfamiliar with this practice. We evaluate this assumption in the realm of bag design, through a Honeycomb Smocking Pattern Catalog and custom Computer-Aided Smocking (CAS) design software. [...]
DOI
Paper
Video
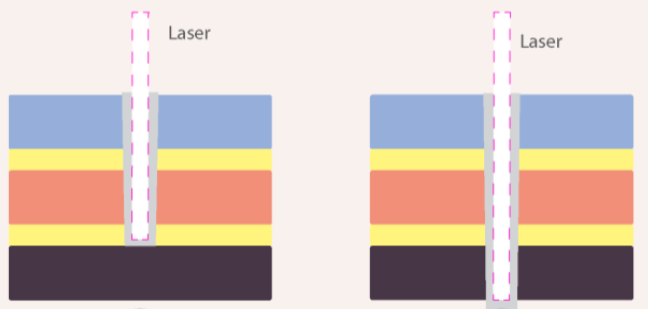
Foldem: Heterogeneous Object Fabrication via Selective Ablation of Multi-Material Sheets (ACM CHI 2016)
oldem, a novel method of rapid fabrication of objects with multi-material properties is presented. Our specially formulated Foldem sheet allows users to fabricate and easily assemble objects with rigid, bendable, and flexible properties using a standard laser-cutter. [...]
DOI
Paper
Video

Steel-Sense: Integrating Machine Elements with Sensors by Additive Manufacturing (ACM CHI 2016)
We present Steel-Sense, an approach to joining these two families of elements to create a new type of HCI design primitive. We leverage recent developments in 3D printing to embed sensing in metal structures that are otherwise difficult to equip with sensors, and present four design principles, implementing. [...]
DOI
Paper
Video
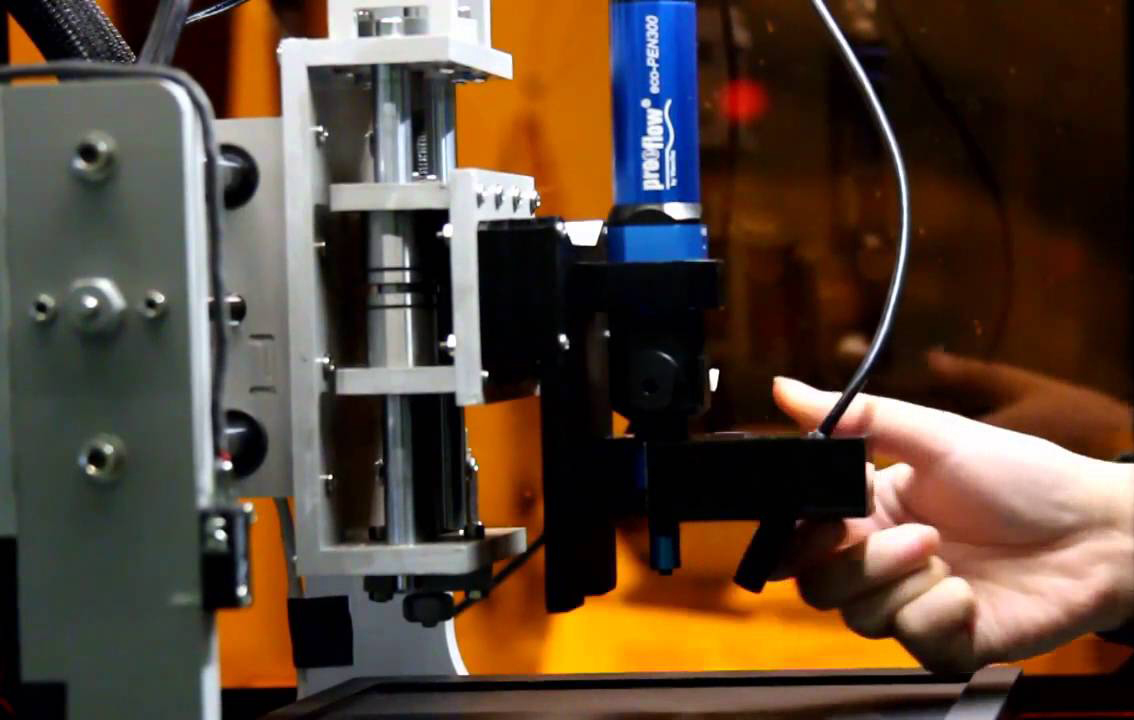
xPrint: A Modularized Liquid Printer for Smart Materials Deposition (ACM CHI 2016)
To meet the increasing requirements of HCI researchers who are looking into using liquid-based materials (e.g., hydrogels) to create novel interfaces, we present a design strategy for HCI researchers to build and customize a liquid-based smart material printing platform with off-the-shelf or easy-to-machine parts. For the hardware, we suggest a magnetic assembly-based modular design. [...]
DOI
Paper
Video
Page
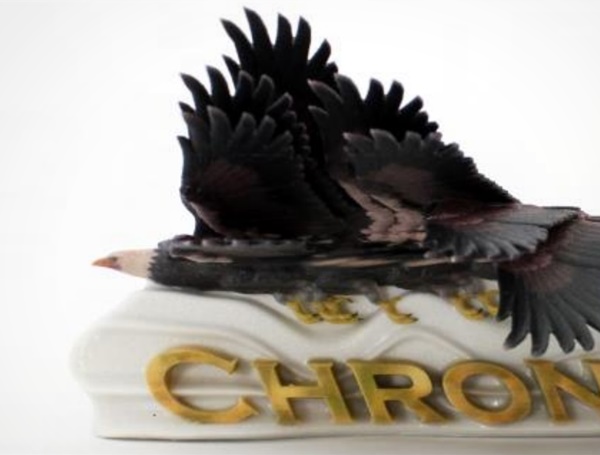
ChronoFab: Fabricating Motion (ACM CHI 2016)
We present ChronoFab, a 3D modeling tool to craft motion sculptures, tangible representations of 3D animated models, visualizing an object's motion with static, transient, ephemeral visuals that are left behind. Our tool casts 3D modeling as a dynamic art-form by employing 3D animation and dynamic simulation for the modeling of motion sculptures. [...]
DOI
Paper
Video
Page
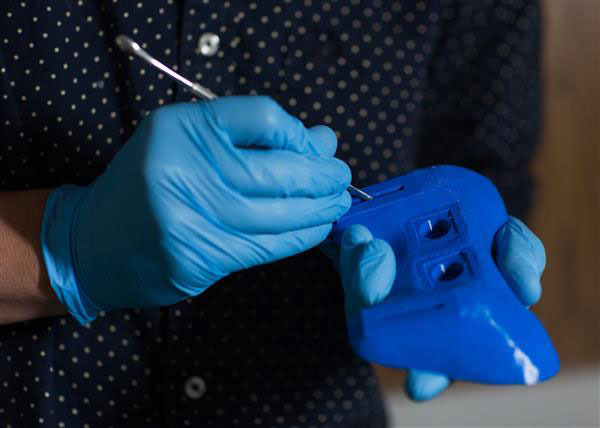
What you Sculpt is What you Get: Modeling Physical Interactive Devices with Clay and 3D Printed Widgets (ACM CHI 2016)
We present a method for fabricating prototypes of interactive computing devices from clay sculptures without requiring the designer to be skilled in CAD software. The method creates a "what you sculpt is what you get" process that mimics the "what you see is what you get" processes used in interface design for 2D screens. [...]
DOI
Video
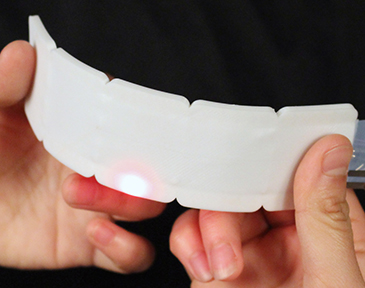
HotFlex: Post-print Customization of 3D Prints Using Embedded State Change (ACM CHI 2016)
We propose HotFlex: a new approach allowing precisely located parts of a 3D object to transition on demand from a solid into a deformable state and back. This approach enables intuitive hands-on remodeling, personalization, and customization of a 3D object after it is printed. We introduce the approach and present an implementation based on computer-controlled printed heating elements that are embedded within the 3D object. [...]
DOI
Paper
Video
Page

RetroFab: A Design Tool for Retrofitting Physical Interfaces using Actuators, Sensors and 3D Printing (ACM CHI 2016)
We present RetroFab, an end-to-end design and fabrication environment that allows non-experts to retrofit physical interfaces. Our approach allows for changing the layout and behavior of physical interfaces. Unlike customizing software interfaces, physical interfaces are often challenging to adapt because of their rigidity. With RetroFab, a new physical interface is designed that serves as a proxy interface for the legacy controls that are now operated using actuators. [...]
DOI
Paper
Video
Page

On-The-Fly Print: Incremental Printing While Modelling (ACM CHI 2016)
In this paper we propose On-the-Fly Print: a 3D modeling approach that allows the user to design
3D models digitally while having a low-fidelity physical wireframe model printed in parallel.
Our software starts printing features as soon as they are created and updates the physical model as needed. [...]
DOI
Paper
Video
Page

Cilllia: 3D Printed Micro-Pillar Structures for Surface Texture, Actuation and Sensing (ACM CHI 2016)
This work presents a method for 3D printing hair-like structures on both flat and curved surfaces.
It allows a user to design and fabricate hair geometries that are smaller than 100 micron.
We built a software platform to let users quickly define the hair angle, thickness, density, and height. [...]
DOI
Paper
Video
Page
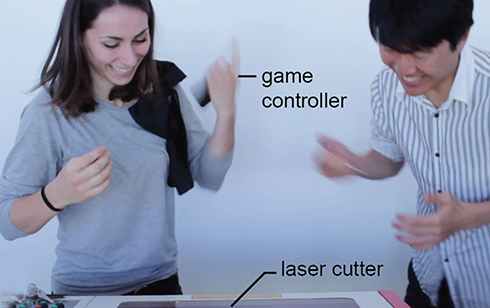
Destructive Games: Creating Value by Destroying Valuable Physical Objects (ACM CHI 2016)
We present a series of games that result in valuable physical objects being destroyed objects owned by the players. Interestingly, we found that we can design these games to be desirable to play, despite the loss of the object, by instead producing social value. [...]
DOI
Paper
Video
Page

Understanding Newcomers to 3D Printing: Motivations, Workflows, and Barriers of Casual Makers (ACM CHI 2016)
We present a study of casual makers, users who have no prior experience with fabrication and mainly explore walk-up-and-use 3D printing services at public print centers, such as libraries, universities, and schools. We carried out 32 interviews with casual makers, print center operators, and fabrication experts to understand the motivations, workflows, and barriers in appropriating 3D printing technologies. [...]
DOI
Paper
Video
Page
2015

AutoConnect: Computational Design of 3D-Printable Connectors (ACM SIGGRAPH Asia 2015)
We present AutoConnect, an automatic method that creates customized, 3D-printable connectors attaching two physical objects together.
Users simply position and orient virtual models of the two objects that they want to connect and indicate some auxiliary information such as weight and dimensions.
Then, AutoConnect creates several alternative designs that users can choose from for 3D printing. The design of the connector is created by combining two holders, one for each object. [...]
DOI
Paper
Video
Page
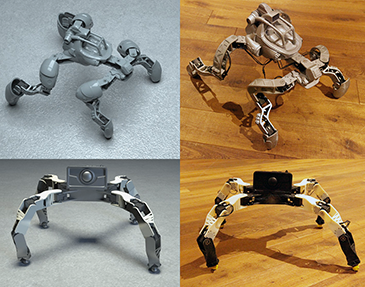
Interactive design of 3D-printable robotic creatures (ACM SIGGRAPH Asia 2015)
We present an interactive design system that allows casual users to quickly create 3D-printable robotic creatures. Our approach automates the tedious parts of the design process while providing ample room for customization of morphology, proportions, gait and motion style. The technical core of our framework is an efficient optimization-based solution that generates stable motions for legged robots of arbitrary designs. [...]
DOI
Paper
Video
Page
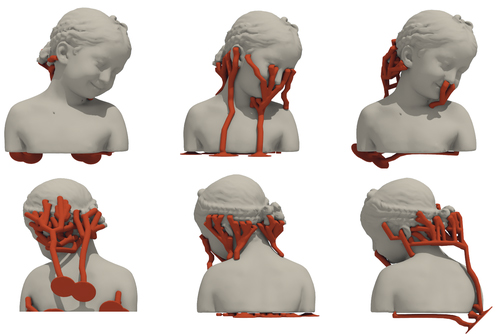
Perceptual models of preference in 3D printing direction (ACM SIGGRAPH Asia 2015)
This paper introduces a perceptual model for determining 3D printing orientations. Additive manufacturing methods involving low-cost 3D printers often require robust branching support structures to prevent material collapse at overhangs. Although the designed shape can successfully be made by adding supports, residual material remains at the contact points after the supports have been removed, resulting in unsightly surface artifacts. Moreover, fine surface details on the fabricated model can easily be damaged while removing supports. [...]
DOI
Paper
Video
Page

Makers' Marks: Physical Markup for Designing and Fabricating Functional Objects (ACM UIST 2015)
We aim to allow makers to design and 3D print functional mechanical and electronic assemblies.
Based on a formative exploration, we created Makers' Marks, a system based on physically authoring assemblies with sculpting materials and annotation stickers.
Makers physically sculpt the shape of an object and attach stickers to place existing parts or high-level features (such as parting lines). [...]
DOI
Paper
Video
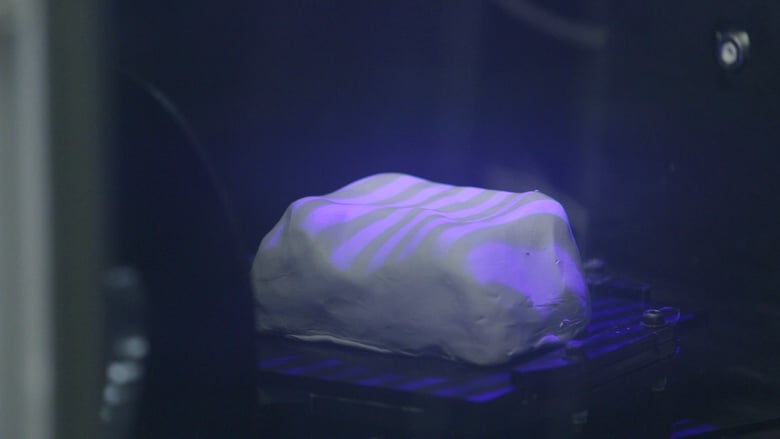
ReForm: Integrating Physical and Digital Design through Bidirectional Fabrication (ACM UIST 2015)
To provide a more flexible design process that allows objects to iteratively evolve through
both digital and physical input, we introduce bidirectional fabrication. To demonstrate the concept,
we built ReForm, a system that integrates digital modeling with shape input, shape output,
annotation for machine commands, and visual output. [...]
DOI
Video
Page
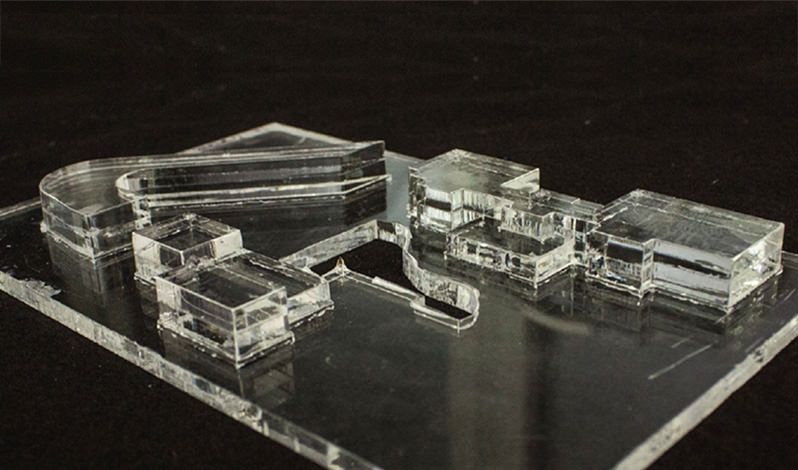
LaserStacker: Fabricating 3D Objects by Laser Cutting and Welding (ACM UIST 2015)
We propose eliminating the assembly step with our system LaserStacker.
The key idea is to use the laser cutter to not only cut but also to weld.
Users place not one acrylic sheet, but a stack of acrylic sheets into their cutter. [...]
DOI
Paper
Video
Page
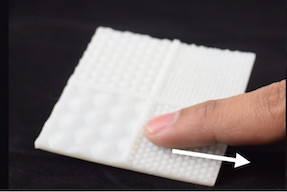
HapticPrint: Designing Feel Aesthetics for Digital Fabrication (ACM UIST 2015)
We present HapticPrint as a pair of design tools to easily modify the feel of a 3D model.
Our external tool maps textures and UI elements onto arbitrary shapes,
and our internal tool modifies the internal geometry of models for novel compliance and weight characteristics.
We demonstrate the value of HapticPrint with a range of applications that expand the aesthetics of feel, usability, and interactivity in 3D artifacts.
[...]
DOI
Paper
Video
Page
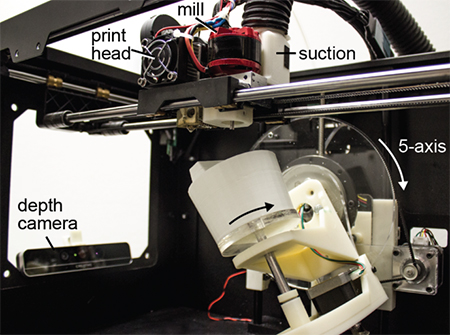
Patching Physical Objects (ACM UIST 2015)
In this paper, we propose a different approach: instead of re-printing the entire object from scratch, we suggest patching the existing object to reflect the next design iteration.
Since only a fraction of the entire object is refabricated, our approach reduces material consumption and plastic waste (for our example objects by 82% and 93% respectively). [...]
DOI
Paper
Video
Page
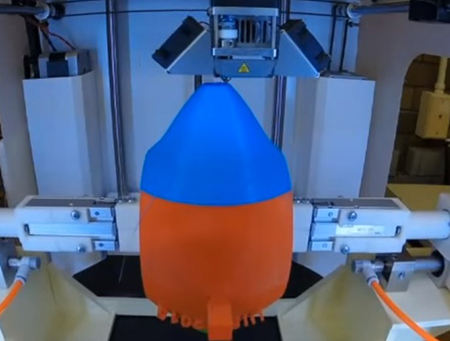
RevoMaker: Enabling Multi-directional and Functionally-embedded 3D printing using a Rotational Cuboidal Platform (ACM UIST 2015)
We present "RevoMaker", a self-contained 3D printer that creates direct out-of-the-printer functional prototypes, using less build material and with substantially less reliance on support structures. By modifying a standard low-cost FDM printer with a revolving cuboidal platform and printing partitioned geometries around cuboidal facets, we achieve a multidirectional additive prototyping process to reduce the print and support material use. [...]
DOI
Paper
Video
Page

Protopiper: Physically Sketching Room-Sized Objects at Actual Scale (ACM UIST 2015)
Protopiper is a mechanical device that allows users to sketch room-sized objects at actual scale. The key idea behind protopiper is that it forms adhesive tape into tubes as its main building material, rather than extruded plastic or photopolymer lines. Since the resulting tubes are hollow they offer excellent strength-to-weight ratio, thus scale well to large structures. [...]
DOI
Paper
Video
Page
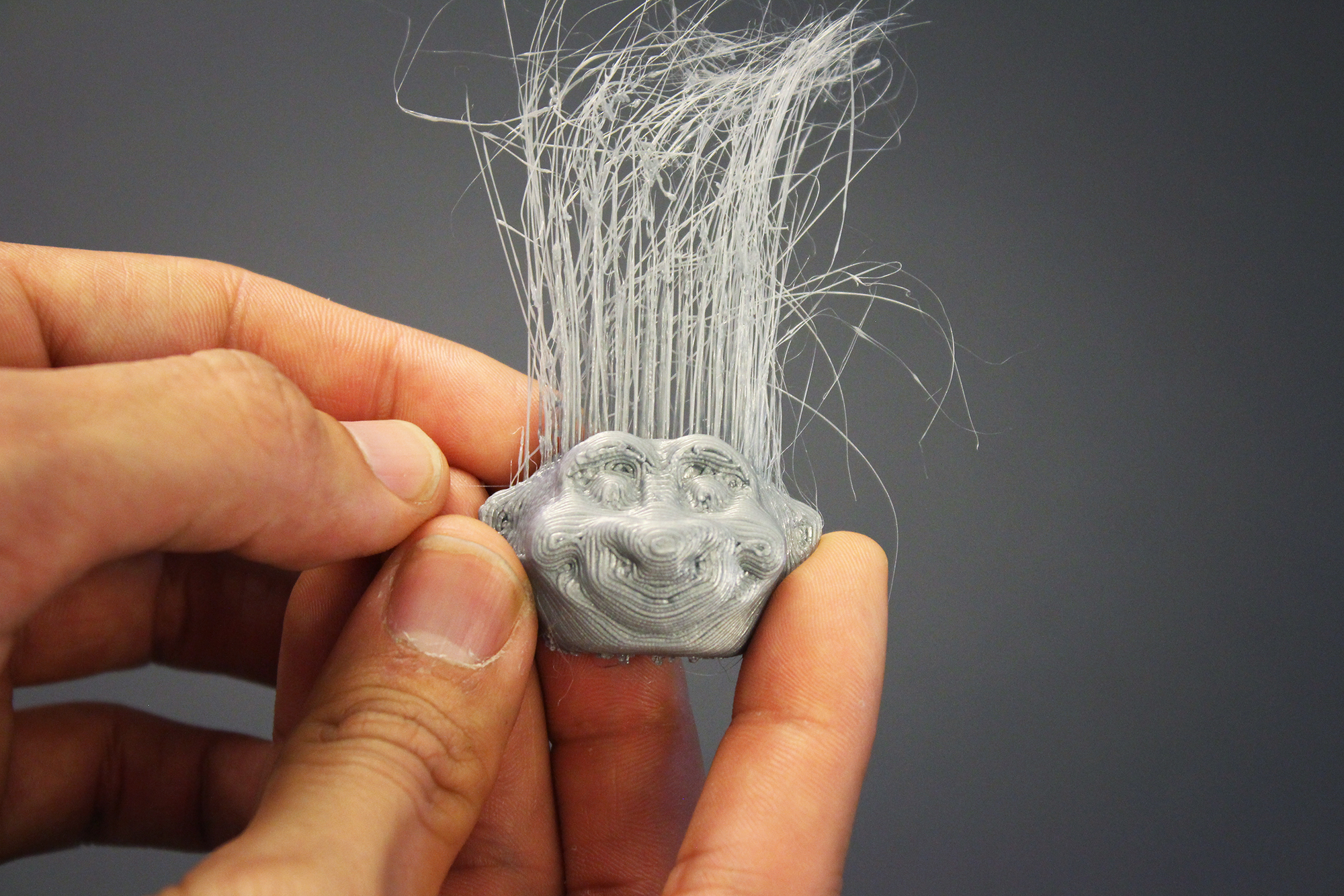
3D Printed Hair: Fused Deposition Modeling of Soft Strands, Fibers and Bristles (ACM UIST 2015)
We introduce a technique for furbricating 3D printed hair, fibers and bristles, by exploiting the stringing phenomena inherent in 3D printers using fused deposition modeling. Our approach offers a range of design parameters for controlling the properties of single strands and also of hair bundles. [...]
DOI
Paper
Video
Page
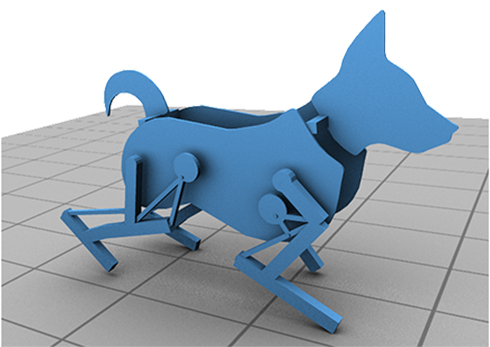
Computational design of walking automata (ACM SCA 2015)
Creating mechanical automata that can walk in stable and pleasing manners is a challenging task that requires both skill and expertise. We propose to use computational design to offset the technical difficulties of this process. A simple drag-and-drop interface allows casual users to create personalized walking toys from a library of pre-defined template mechanisms. [...]
DOI
Paper
Video
Page
Texture Mapping Real-World Objects with Hydrographics (ACM SGP 2015)
In this paper, we develop a method to enable texture mapping of physical objects,
that is, we allow one to map an arbitrary color image onto a three-dimensional object.
Our approach builds upon hydrographics,
a technique to transfer pigments printed on a sheet of polymer onto curved surfaces. [...]
DOI
Paper
Video
Page

Reforming Shapes for Material-aware Fabrication (ACM SGP 2015)
In this work, we propose a novel data-driven reforming i.e., reshaping algorithm
that adapts an input multi-component model for a target fabrication material.
The algorithm adapts both the part geometry and the inter-part topology of the input
shape to better align with material-aware fabrication requirements. [...]
DOI
Paper
Video
Page
Hybrid craft: showcase of physical and digital integration of design and craft skills (ACM SIGGRAPH 2015)
This article introduces the Hybrid Craft exhibition, positioning 15 hybrid projects in the context of today's Maker culture. Each project demonstrates a unique integration of contemporary making practice with traditional craft. The presenters in the show represent a wide range of professional backgrounds: independent makers, students and teachers, designers associated with research institutes, and commercial organizations. [...] DOI Paper Page
This article introduces the Hybrid Craft exhibition, positioning 15 hybrid projects in the context of today's Maker culture. Each project demonstrates a unique integration of contemporary making practice with traditional craft. The presenters in the show represent a wide range of professional backgrounds: independent makers, students and teachers, designers associated with research institutes, and commercial organizations. [...] DOI Paper Page
MultiFab: a machine vision assisted platform for multi-material 3D printing (ACM SIGGRAPH 2015)
We have developed a multi-material 3D printing platform that is high-resolution, low-cost, and extensible.
The key part of our platform is an integrated machine vision system. This
system allows for self-calibration of printheads, 3D scanning, and a closed-feedback loop to enable print corrections. [...]
DOI Paper
Video
Page
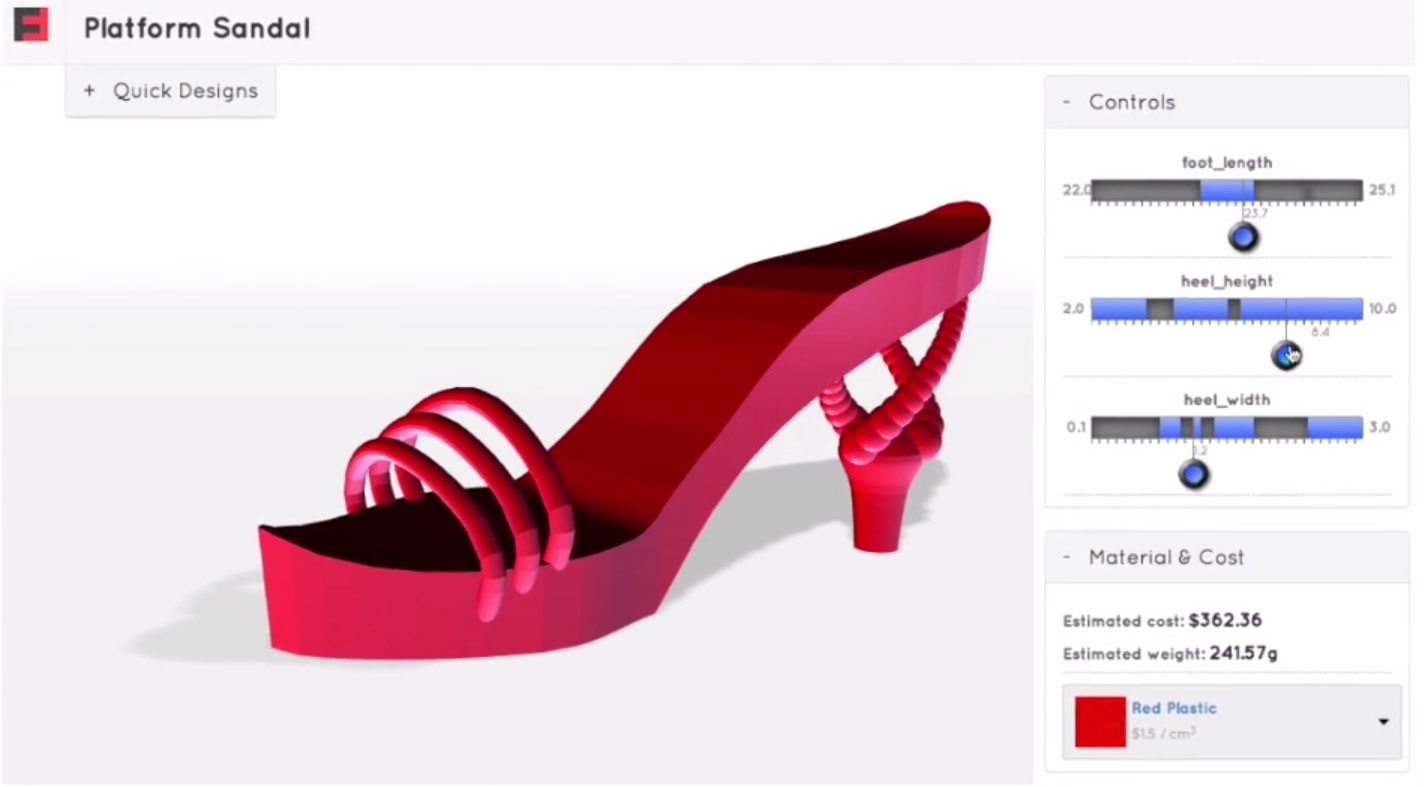
Fab Forms: Customizable Objects For Fabrication With Validity And Geometry Caching (ACM SIGGRAPH 2015)
We define Fab Form as any design representation that lends itself to interactive customization by a novice user,
while remaining valid and manufacturable.
We propose a method to achieve these Fab Form requirements for general parametric designs
tagged with a general set of automated validity tests and a small number of parameters exposed to the casual user.
Our solution separates Fab Form evaluation into a precomputation stage and a runtime stage. [...]
DOI
Paper
Video
Page

Augmented Airbrush for Computer Aided Painting (CAP) (ACM SIGGRAPH 2015)
We present an augmented airbrush that allows novices to experience the art of spray painting.
Inspired by the thriving field of smart tools, our handheld device uses 6DOF tracking, augmentation of
the airbrush trigger,
and a specialized algorithm to restrict the application of paint to a preselected reference image. [...]
DOI
Paper
Video
Page

Elastic textures for additive fabrication (ACM SIGGRAPH 2015)
We introduce elastic textures: a set of parametric, tileable, printable, cubic patterns achieving a broad range
of isotropic elastic material properties: the softest pattern is over a thousand times softer than the stiffest,
and the Poisson's ratios range from below zero to nearly 0.5. Using a combinatorial search over topologies followed
by shape optimization,
we explore a wide space of truss-like, symmetric 3D patterns to obtain a small family. [...]
DOI
Paper
Video
Page

OmniAD: data-driven omni-directional aerodynamics (ACM SIGGRAPH 2015)
This paper introduces "OmniAD," a novel data-driven pipeline to model and acquire the aerodynamics of
three-dimensional rigid objects. Traditionally, aerodynamics are examined through elaborate wind tunnel
experiments or expensive fluid dynamics computations, and are only measured for a small number of discrete wind
directions. [...]
DOI
Paper
Video
Page
LinkEdit: interactive linkage editing using symbolic kinematics (ACM SIGGRAPH 2015)
Articulated deformable characters are widespread in computer animation. Unfortunately, we lack methods for their automatic fabrication using modern additive manufacturing (AM) technologies. We propose a method that takes a skinned mesh as input, then estimates a fabricatable single-material model that approximates the 3D kinematics of the corresponding virtual articulated character in a piecewise linear manner. [...]
DOI
Paper
Video
Page

Computational design of metallophone contact sounds (ACM SIGGRAPH 2015)
Metallophones such as glockenspiels produce sounds in response to contact. Building these instruments is a complicated process, limiting their shapes to well-understood designs such as bars. We automatically optimize the shape of arbitrary 2D and 3D objects through deformation and perforation to produce sounds when struck which match user-supplied frequency and amplitude spectra. [...]
DOI
Paper
Video
Page
Pushing the Limits of 3D Color Printing: Error Diffusion with Translucent Materials (ACM SIGGRAPH 2015)
In this article, we propose an error diffusion halftoning approach to achieve full color with multi-jet printers, which operates on multiple isosurfaces or layers within the object. We propose a novel traversal algorithm for voxel surfaces, which allows the transfer of existing error diffusion algorithms from 2D printing. The resulting prints faithfully reproduce colors, color gradients and fine-scale details. [...]
DOI
Paper
Video

Microstructures to control elasticity in 3D printing (ACM SIGGRAPH 2015)
We propose a method for fabricating deformable objects with spatially varying elasticity using 3D printing. Using a single, relatively stiff printer material, our method designs an assembly of small-scale microstructures that have the effect of a softer material at the object scale, with properties depending on the microstructure used in each part of the object. We build on work in the area of metamaterials, using numerical optimization to design tiled microstructures with desired properties, but with the key difference that our method designs families of related structures that can be interpolated to smoothly vary the material properties over a wide range. [...]
DOI
Paper
Video
Page

Dapper: decompose-and-pack for 3D printing (ACM SIGGRAPH 2015)
We present Dapper, a global optimization algorithm for the DAP problem which can be applied to both powder- and FDM-based 3D printing. The solution search is top-down and iterative. Starting with a coarse decomposition of the input shape into few initial parts, we progressively pack a pile in the printing volume, by iteratively docking parts, possibly while introducing cuts, onto the pile. [...]
DOI
Paper
Video

MetaMorphe: Designing Expressive 3D Models for Digital Fabrication (ACM Creativity and Cognition 2015)
We introduce MetaMorphe, a novel digital fabrication framework that uses a common web-programming metaphor
to enable users to easily transform static 3D models into re-formed, re-made, and re-imagined customized personal
artifacts. We demonstrate the compatibility of MetaMorphe with three well-established design interfaces,
direction manipulation, scripted-CAD, and generative design. [...]
DOI
Paper
Video
Page
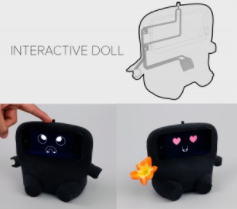
Acoustruments: Passive, Acoustically-Driven Interactive Controls for Hand Held Devices (ACM CHI 2015)
We introduce Acoustruments: low-cost, passive, and powerless mechanisms, made from plastic, that can bring rich, tangible functionality to handheld devices. Through a structured exploration, we identified an expansive vocabulary of design primitives, providing building blocks for the construction of tangible interfaces utilizing smartphones’ existing audio functionality. [...] DOI Paper Video Page
We introduce Acoustruments: low-cost, passive, and powerless mechanisms, made from plastic, that can bring rich, tangible functionality to handheld devices. Through a structured exploration, we identified an expansive vocabulary of design primitives, providing building blocks for the construction of tangible interfaces utilizing smartphones’ existing audio functionality. [...] DOI Paper Video Page
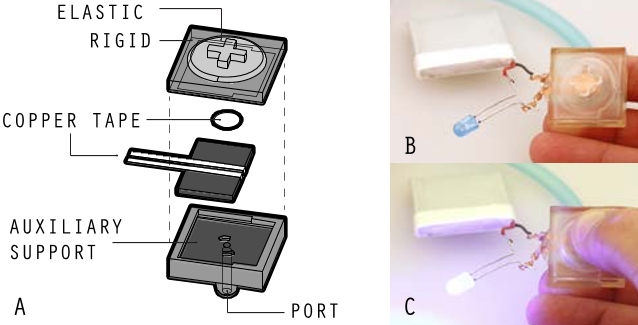
3D Printing Pneumatic Device Controls with Variable Activation Force Capabilities (ACM CHI 2015)
We explore 3D printing physical controls whose tactile response can be manipulated programmatically through pneumatic actuation.
We introduce and discuss a series of example 3D printed pneumatic controls, which demonstrate the feasibility of our approach. This includes conventional controls,
such as buttons, knobs and sliders, but also extends to domains such as toys and deformable interfaces. [...]
DOI
Paper
Video
Page
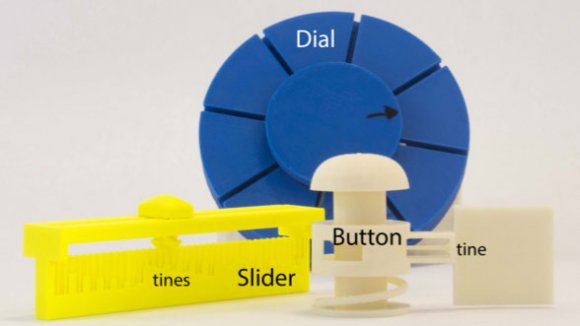
Lamello: Passive Acoustic Sensing for Tangible Input Components (ACM CHI 2015)
We describe Lamello, an approach for creating tangible input components that recognize user interaction
via passive acoustic sensing.
Lamello employs comb-like structures with varying-length tines at interaction points (e.g., along slider paths).
Our main contributions are in the co-design of the tine structures, information encoding schemes, and audio analysis. [...]
DOI
Paper
Video
Page

Platener: Low-Fidelity Fabrication of 3D Objects by Substituting 3D Print with Laser-Cut Plates (ACM CHI 2015)
This paper presents Platener, a system that allows quickly fabricating intermediate design iterations of 3D models, a process also known as low-fidelity fabrication. Platener achieves its speed-up by extracting straight and curved plates from the 3D model and substituting them with laser cut parts of the same size and thickness. Only the regions that are of relevance to the current design iteration are executed as full-detail 3D prints. [...]
DOI Paper Video Page
DOI Paper Video Page

D-Coil: A Hands-on Approach to Digital 3D Models Design (ACM CHI 2015)
We introduce D-Coil, a new digital 3D modeling approach using wax coiling to bring tangibility to
the design of digital models. After defining a shape to extrude,
the users follow the lead of a hand-held actuated extruder to instantiate the actual extrusion using wax. [...]
DOI
Paper
Video
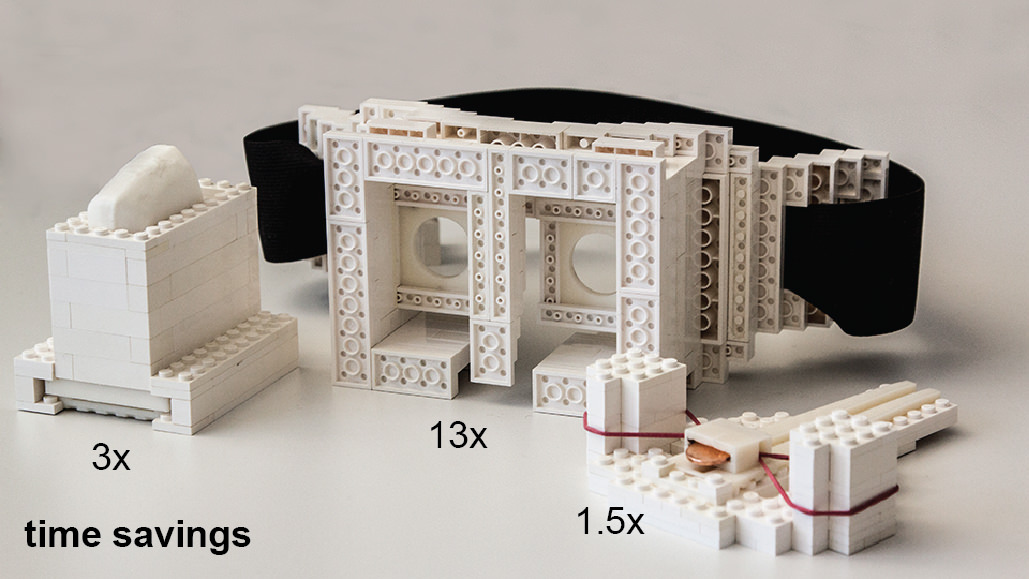
Low-Fidelity Fabrication: Speeding up Design Iteration of 3D Objects (ACM CHI 2015)
Low-fidelity fabrication systems speed up rapid prototyping by printing intermediate versions of a prototype as fast, low-fidelity previews. Only the final version is fabricated as a full high-fidelity 3D print.
This allows designers to iterate more quickly-achieving a better design in less time. [...]
DOI Paper Video Page
DOI Paper Video Page
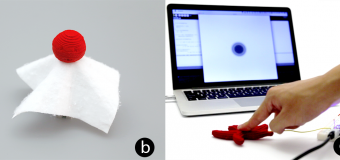
A Layered Fabric 3D Printer for Soft Interactive Objects (ACM CHI 2015)
We present a new type of 3D printer that can form precise,
but soft and deformable 3D objects from layers of off-the-shelf fabric. Our printer employs an approach where
a sheet of fabric forms each layer of a 3D object. The printer cuts this sheet along the 2D contour of the layer
using a laser cutter and then bonds
it to previously printed layers using a heat sensitive adhesive. [...]
DOI
Paper
Video
Page

Scotty: Relocating Physical Objects Across Distances Using Destructive Scanning, Encryption, and 3D Printing (ACM TEI 2015)
We present a simple self-contained appliance that allows relocating inanimate physical objects across distance. Each unit consists of an off-the-shelf 3D printer that we have extended with a 3-axis milling machine, a camera, and a micro-controller for encryption/decryption and transmission. Users see the object appear layer-by-layer on the receiver side as it disappears layer-by-layer at the sender side. [...]
DOI
Paper
Video
Page
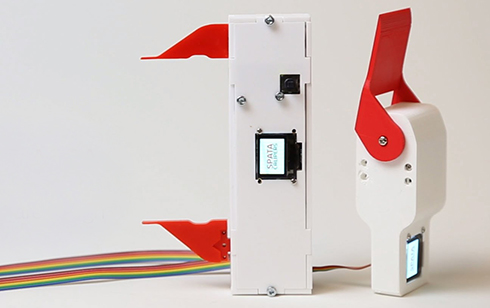
SPATA: Spatio-Tangible Tools for Fabrication-Aware Design (ACM TEI 2015)
SPATA is the digital adaptation of two spatial measurement tools, that explores their closer integration into virtual design environments. We adapt two of the traditional measurement tools: calipers and protractors. Both tools can measure, transfer, and present size and angle. Their close integration into different design environments makes tasks more fluid and convenient. [...]
DOI
Paper
Video
2014

Everyday making: identifying future uses for 3D printing in the home (ACM DIS 2014)
To explore the potential uses of 3D printers and other fabrication devices in the home, we conducted a study in which 10 households (with 28 individuals) kept a faux 3D printer in their homes for four weeks. Participants kept a log of items that they would want to print, and completed a series of design probes. We found that participants' use of the fabrication tools involved three activities: replicating existing objects, modifying and customizing existing objects, and creating new custom objects. Our study also provides insights on the types of objects that individuals wish to create, and how the faux 3D printer was situated in our participants' homes.
[...]
DOI
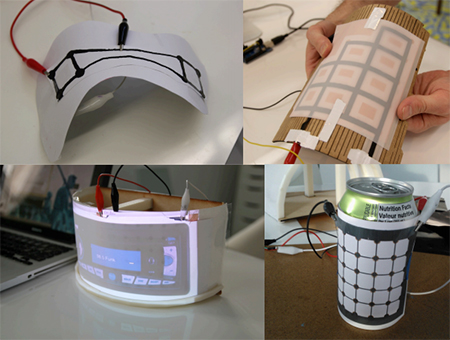
Sensing touch using resistive graphs (ACM DIS 2014)
In early design, instrumenting an object with touch sensing capability, especially one with complex surface geometry, can be problematic. In this paper, we show how resistive graph patterns--or resigraphs--can be used to quickly fabricate multi-touch sensors tailored to an object's shape. In very early ideation, resigraphs can be drawn using conductive ink. In later refinements they can be silk-screened or laser cut from off-the-shelf materials. A resigraph uses a commonly available microprocessor (e.g. Arduino), re-quires only three wires, and enables touch input on non-planar and non-developable surfaces.
[...]
DOI
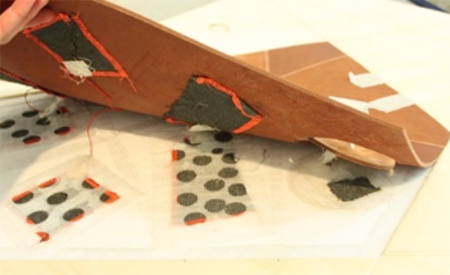
Leather as a material for crafting interactive and physical artifacts (ACM DIS 2014)
In this paper, we present a series of small scale explorations of leather, first as skin close interfaces for physical engagement, and secondly in terms of crafting using hand tools and a laser cutter. We reflect on our experiences along these two strands and discuss future possibilities of leather as a rich material for providing new types of interactive experiences. By discussing emerging topics related to traditional crafting processes and contemporary rapid fabrication with this material, we find a great potential of merging such processes and tools for future interaction design settings.
[...]
DOI
PDF
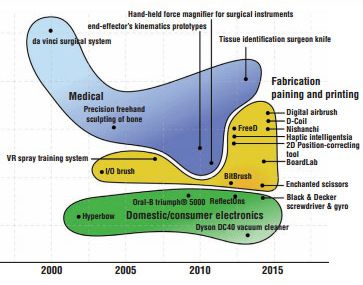
The Wise Chisel: The Rise of the Smart Handheld Tool (IEEE Pervasive Computing 2014)
Here, the authors offer a definition for smart handheld tools, discuss the tools' origins and motivation, and present a survey of prominent work by themselves and others in disciplines such as fabrication, painting, printing, and maintenance. They also discuss their experiences operating in this new territory and conclude with a vision of a hybrid creative practice: smart handheld instruments that enable synergetic cooperation with human skill, personal style, and computational assistance that results in accuracy, guidance, and protection for users. [...]
DOI
Page

Field-Aligned Mesh Joinery (ACM SIGGRAPH Asia 2014)
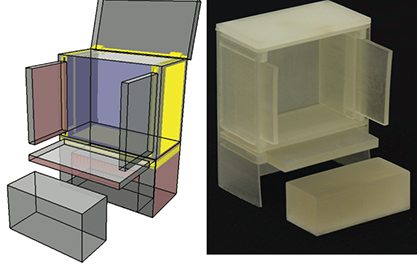
Creating works-like prototypes of mechanical objects (ACM SIGGRAPH Asia 2014)
Designers often create physical works-like prototypes early in the product development cycle to explore possible mechanical architectures for a design. Yet, creating functional prototypes requires time and expertise, which discourages rapid design iterations. Designers must carefully specify part and joint parameters to ensure that parts move and fit and together in the intended manner. We present an interactive system that streamlines the process by allowing users to annotate rough 3D models with high-level functional relationships (e.g., part A fits inside part B). [...]
DOI
Paper
Video
Page
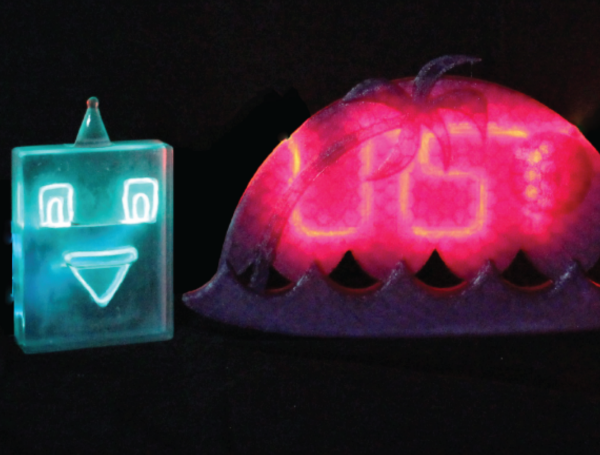
A series of tubes: adding interactivity to 3D prints using internal pipes (ACM UIST 2014)
We investigate how 3D models can be modified to facilitate the creation of interactive objects that offer dynamic input and output. We introduce a general technique for supporting
the rapid prototyping of interactivity by removing interior material from 3D models to form internal pipes.
We describe this new design space of pipes for interaction design, where variables include openings, path constraints, topologies, and inserted media.
[...]
DOI
Paper
Video
Page
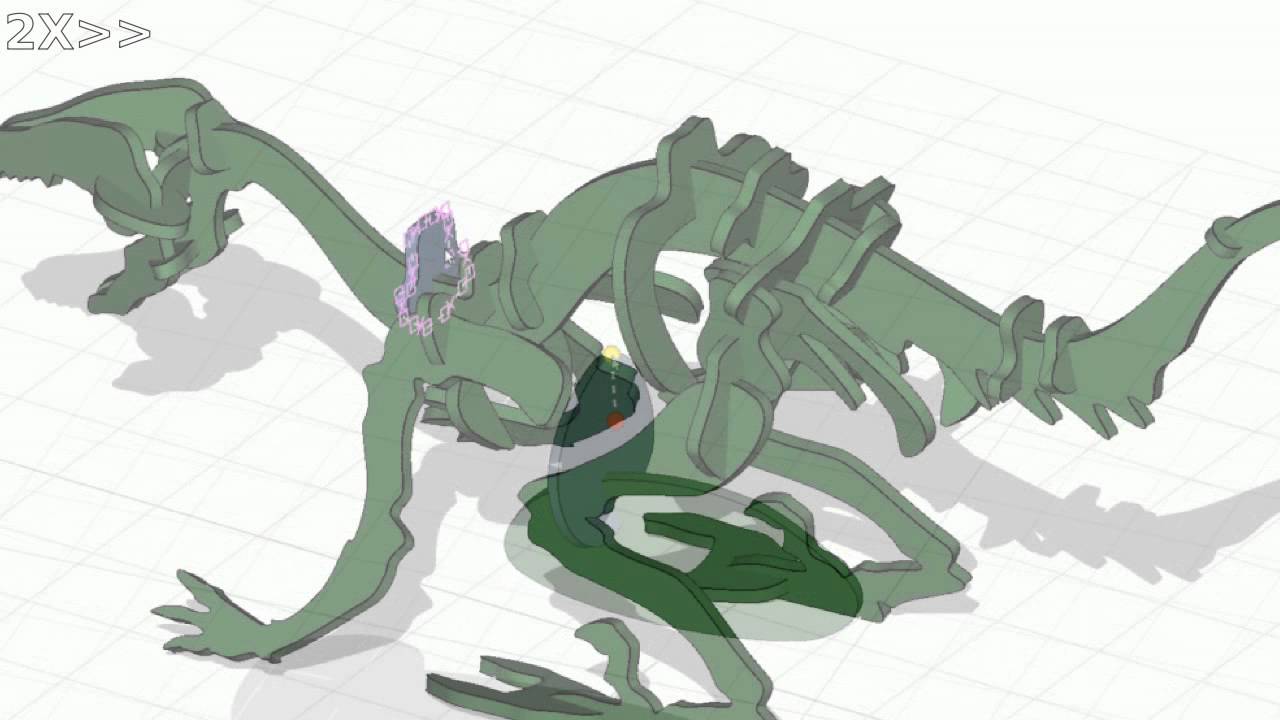
FlatFitFab: interactive modeling with planar sections (ACM UIST 2014)
We present a comprehensive system to author planar section structures, common in art and engineering.
A study on how planar section assemblies are imagined and drawn guide our design principles:
planar sections are best drawn in-situ, with little foreshortening,
orthogonal to intersecting planar sections, exhibiting regularities between planes and contours. [...]
DOI
Paper
Video
Page
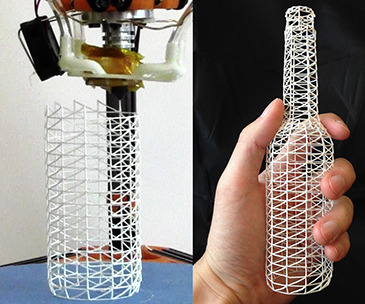
WirePrint: 3D printed previews for fast prototyping (ACM UIST 2014)
With WirePrint, we propose to instead print low-fidelity wireframe previews in the early stages of the design process.
Wireframe previews are 3D prints in which surfaces have been replaced with a wireframe mesh.
Since wireframe previews are to scale and represent the overall shape of the 3D object,
they allow users to quickly verify key aspects of their 3D design, such as the ergonomic fit. [...]
DOI
Paper
Video
Page

Pteromys: interactive design and optimization of free-formed free-flight model airplanes (ACM SIGGRAPH 2014)
This paper introduces novel interactive techniques for designing original hand-launched free-flight glider airplanes which can actually fly.
We present a compact and efficient representation of glider aerodynamics that can be fit to real-world conditions using a data-driven method. [...]
DOI Paper
Video
Page

Computational design of linkage-based characters (ACM SIGGRAPH 2014)
We present a design system for linkage-based characters, combining form and function in an aesthetically-pleasing
manner. Linkage-based character design exhibits a mix of discrete and continuous problems,
making for a highly unintuitive design space that is difficult to navigate without assistance. [...]
DOI
Paper
Video
Page
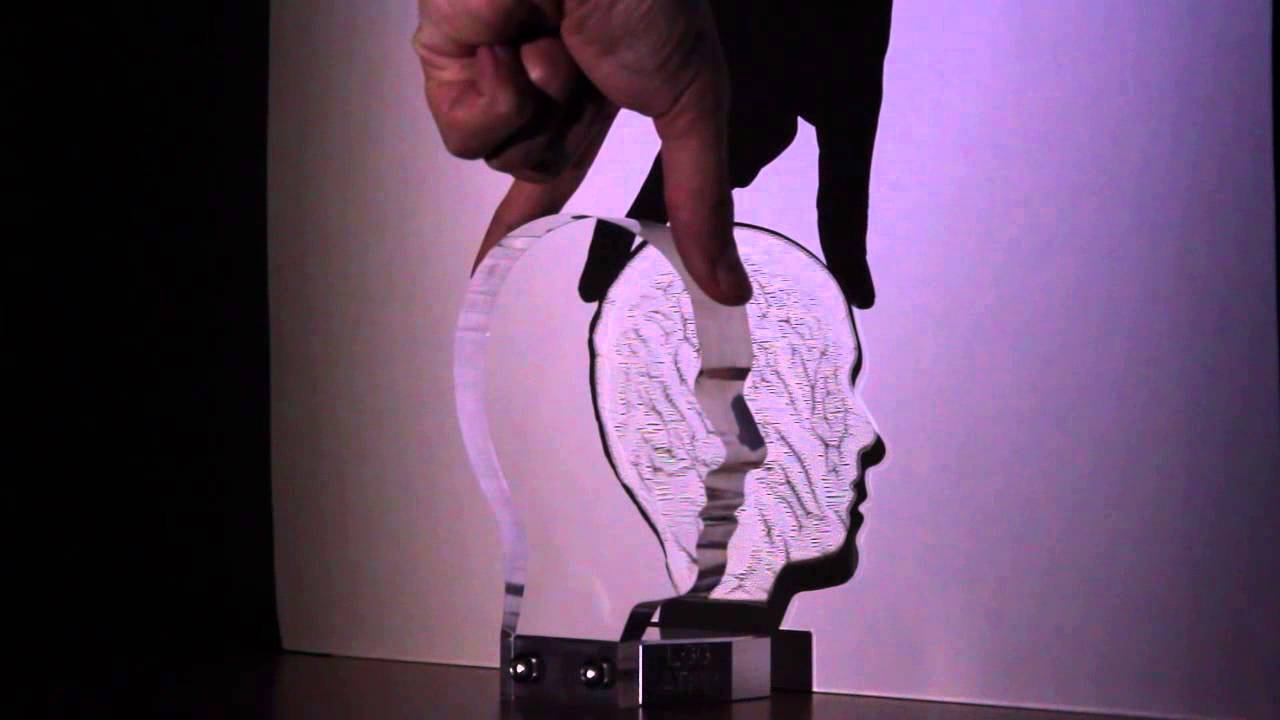
High-contrast computational caustic design (ACM SIGGRAPH 2014)
We present a new algorithm for computational caustic design.
Our algorithm solves for the shape of a transparent object such that the refracted light paints a desired caustic image on a receiver screen. We introduce an optimal
transport formulation to establish a correspondence between the input geometry and the unknown target shape. [...]
DOI
Paper
Video
Page
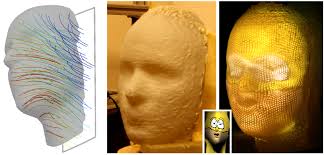
Computational Light Routing: 3D Printed Optical Fibers for Sensing and Display (ACM SIGGRAPH 2014)
We introduce automatic fiber design algorithms together with new manufacturing techniques
to route light between two arbitrary surfaces. Our implicit algorithm optimizes light transmission
by minimizing fiber curvature and maximizing
fiber separation while respecting constraints such as fiber arrival angle. [...]
DOI
Paper
Page
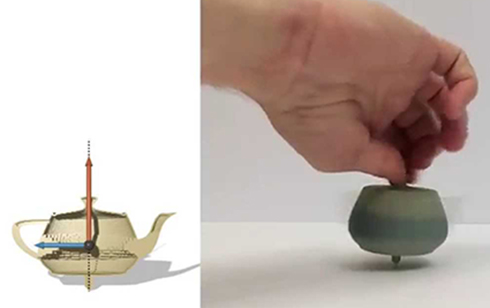
Spin-It: Optimizing Moment of Inertia for Spinnable Objects (ACM SIGGRAPH 2014)
Spinning tops and yo-yos have long fascinated cultures around the world with their unexpected, graceful motions that seemingly elude gravity. We present an algorithm to generate designs for spinning objects by optimizing rotational dynamics properties. As input, the user provides a solid 3D model and a desired axis of rotation. Our approach then modifies the mass distribution such that the principal directions of the moment of inertia align with the target rotation frame. [...]
DOI
Paper
Video
Page
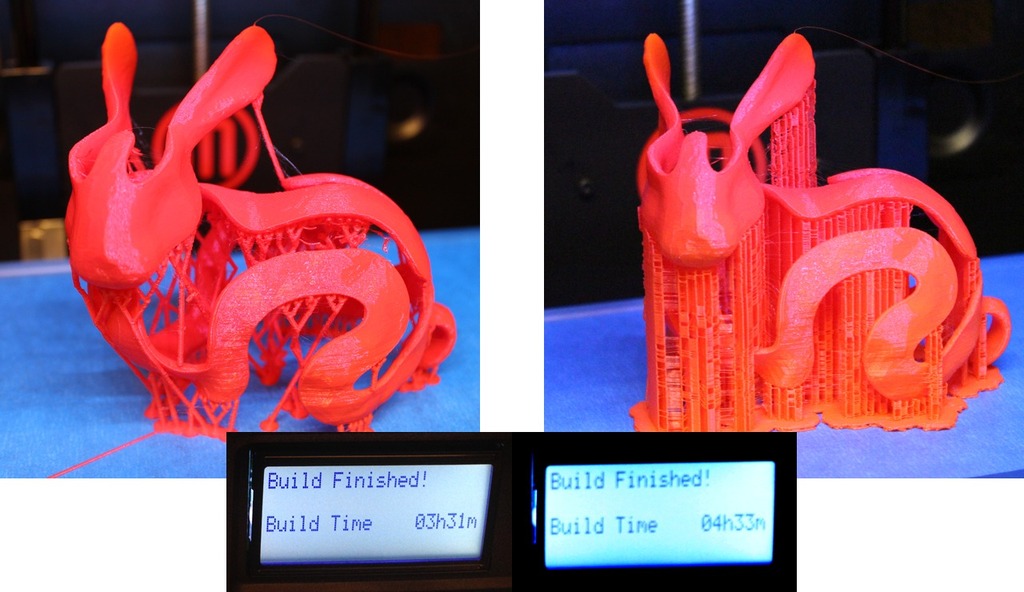
Branching support structures for 3D printing (ACM SIGGRAPH 2014)
Most 3D printing processes can be modeled by an incremental stacking of thin, flexible layers. In this case, it is apparent that for complex shapes, some stacks will be "floating" in mid-air unless they are supported from below by additional material. Similarly if a slice is much larger than the one below it, it will droop unless supported. These areas are called overhangs [Evans 2012], and most 3D printing software provides automated generation of some kind of support structure. However, the support is waste, of both time and material, and this waste should be minimized. [...]
DOI
Paper
Page
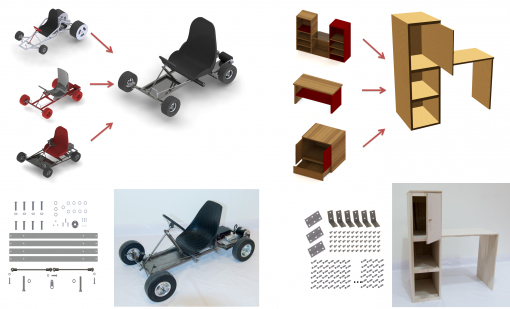
Design and fabrication by example (ACM SIGGRAPH 2014)
We propose a data-driven method for designing 3D models that can be fabricated. First, our approach converts a collection of expert-created designs to a dataset of parameterized design templates that includes all information necessary for fabrication. The templates are then used in an interactive design system to create new fabri-cable models in a design-by-example manner. A simple interface allows novice users to choose template parts from the database, change their parameters, and combine them to create new models. [...]
DOI
Paper
Video
Page
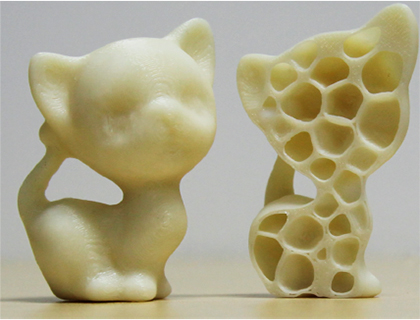
Build-to-last: strength to weight 3D printed objects (ACM SIGGRAPH 2014)
We introduce a hollowing optimization algorithm based on the concept of honeycomb-cells structure. Honeycombs structures are known to be of minimal material cost while providing strength in tension. We utilize the Voronoi diagram to compute irregular honeycomb-like volume tessellations which define the inner structure. We formulate our problem as a strength--to--weight optimization and cast it as mutually finding an optimal interior tessellation and its maximal hollowing subject to relieve the interior stress. [...]
DOI
Paper
Video
Page
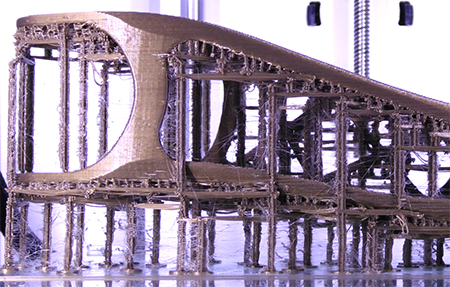
Bridging the gap: automated steady scaffoldings for 3D printing (ACM SIGGRAPH 2014)
We propose to exploit the ability of FFF printers to print bridges across gaps. Since bridges are always supported by pillars at their extremities, they are both stronger and more stable than hierarchical tree structures. The result is an automated support generation technique using little material while ensuring fine surface quality and stability during the printing process. [...]
DOI
Paper
Page

The Hybrid Artisans: A Case Study in Smart Tools (ACM CHI 2014, ACM ToCHI 2014)
We present an approach to combining digital fabrication and craft, demonstrating a
hybrid interaction paradigm where human and machine work in synergy.
The FreeD is a hand-held digital milling device, monitored
by a computer while preserving the makers freedom to manipulate the work in many creative ways. [...]
DOI
Video
Page

MixFab: a mixed-reality environment for personal fabrication (ACM CHI 2014)
In this paper, we introduce MixFab, a mixed-reality environment for personal fabrication
that lowers the barrier for users to engage in personal fabrication. Users design objects in an
immersive augmented reality environment, interact with virtual objects
in a direct gestural manner and can introduce existing physical objects effortlessly into their designs. [...]
DOI Paper
Video
Page
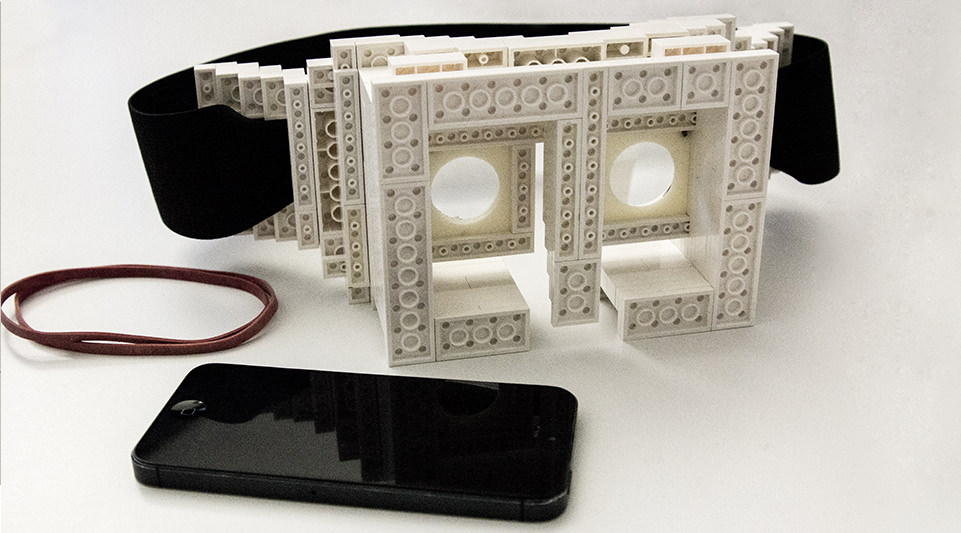
faBrickation: fast 3D printing of functional objects by integrating construction kit building blocks (ACM CHI 2014)
We present a new approach to rapid prototyping of functional objects, such as the body of a head-mounted display.
The key idea is to save 3D printing time by automatically substituting sub-volumes with standard building blocks'in our case Lego bricks.
When making the body for a head-mounted display, for example, getting the optical path right is paramount. [...]
DOI
Paper
Video Page

Printing Teddy Bears: A Technique for 3D Printing of Soft Interactive Objects (ACM CHI 2014)
This paper considers the design, construction, and example use of a new type of 3D printer which
fabricates three-dimensional objects from soft fibers (wool and wool blend yarn).
The resulting objects recreate the geometric forms specified in the solid models which specify them,
but are soft and flexible -- somewhat reminiscent in character to hand knitted materials. [...]
DOI
Paper
Video
Page

PackMerger: A 3D Print Volume Optimizer (EUROGRAPHICS 2014)
Our PackMerger framework converts
the input 3D watertight mesh into a shell by hollowing its inner parts. The shell is then divided into segments. The
location of splits is controlled based on several parameters, including the size of the connection areas or volume
of each segment. The pieces are then tightly packed using optimization. [...]
DOI
Paper
Video
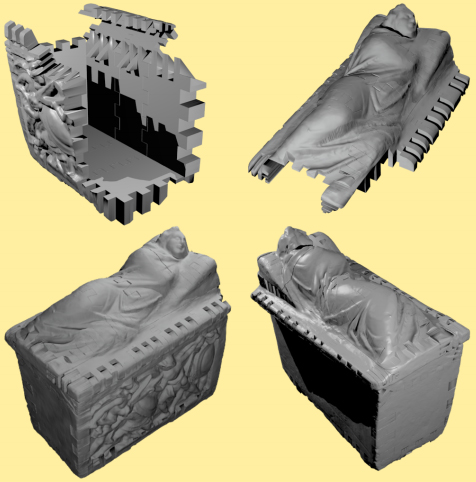
Interlocking pieces for printing tangible cultural heritage replicas (EUROGRAPHICS 2014)
We propose a technique to decompose a 3D digital shape into a set of interlocking pieces that are easy to
be manufactured and assembled. The pieces are designed so that they can be represented as a simple height
field and, therefore, they can be manufactured by common 3D printers without the usage of supporting material.
The removal of
the supporting material is often a burdensome task and may eventually damage the surface of the printed object. [...]
DOI
Paper
Page
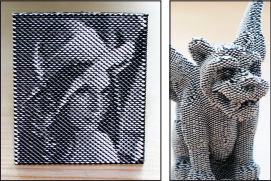
Dual-color mixing for fused deposition modeling printers (EUROGRAPHICS 2014)
In this work we detail a method that leverages the two color heads of recent low-end fused deposition modeling FDM 3D printers to produce continuous tone imagery.
The key insight behind our work is that by applying small geometric offsets, tone can be varied without the need to switch color print heads within a single layer.
[...]
DOI
Paper
Page

Clever Support: Efficient Support Structure Generation for Digital Fabrication (EUROGRAPHICS 2014)
We present a novel, geometry-based approach that minimizes the support material while providing sufficient support.
Using our approach, the input 3D model is first oriented into a position with minimal area that requires support.
Then the points in this area that require support are detected. [...]
DOI
Paper
2013

3D-Printing Spatially Varying BRDFs (IEEE COMPUTER GRAPHICS AND APPLICATIONS 2013)
A new method fabricates custom surface reflectance and spatially varying bidirectional reflectance
distribution functions (svBRDFs). Researchers optimize a microgeometry for a
range of normal distribution functions and simulate the resulting surface's effective reflectance. [...]
DOI
Paper
Page

Cost-effective printing of 3D objects with skin-frame structures (ACM SIGGRAPH Asia 2013)
In this paper, we present an automatic solution to design a skin-frame structure
for the purpose of reducing the material cost in printing a given 3D object.
The frame structure is designed by an optimization scheme which significantly reduces material
volume and is guaranteed to be physically stable,
geometrically approximate, and printable. [...]
DOI Paper
Video
Page
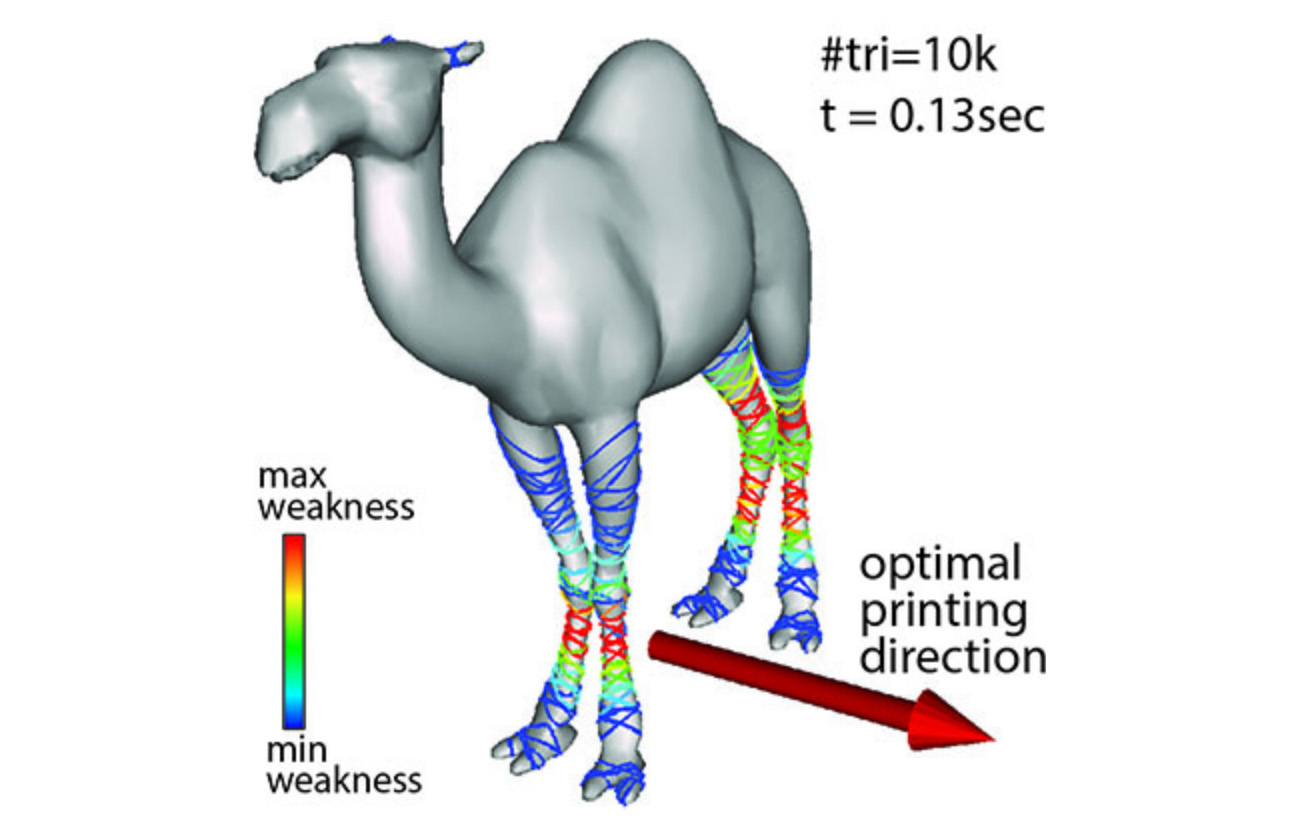
Cross-sectional structural analysis for 3D printing optimization (ACM SIGGRAPH Asia 2013)
We propose a novel cross-sectional structural analysis technique that efficiently detects critical stress
inside a 3D object. We slice the object into cross-sections and compute stress based on bending momentum
equilibrium. Unlike traditional approaches based on finite element methods,
our method doesn’t require a volumetric mesh or solution of linear systems, enabling interactive analysis speed. [...]
DOI
Paper
Video
Page
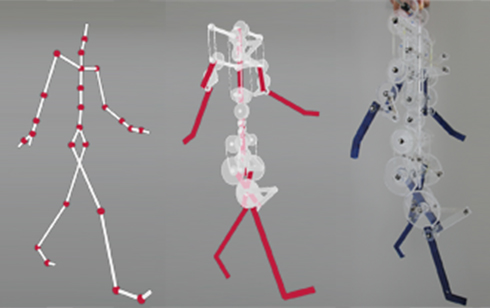
Designing and fabricating mechanical automata from mocap sequences (ACM SIGGRAPH Asia 2013)
We propose an automatic algorithm that takes a motion sequence of a humanoid character and generates the design for a mechanical figure that approximates the input motion when driven with a single input crank. Our approach has two stages. The motion approximation stage computes a motion that approximates the input sequence as closely as possible while remaining compatible with the geometric and motion constraints of the mechanical parts in our design. [...]
DOI
Paper
Video
Page
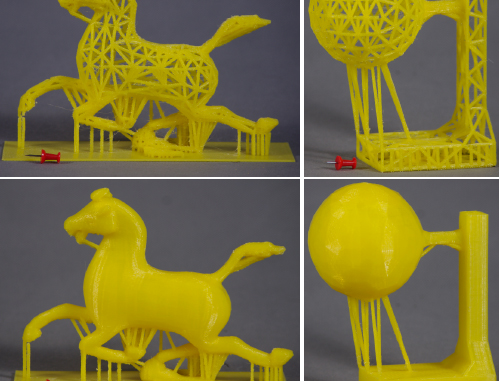
Cost-effective printing of 3D objects with skin-frame structures (ACM SIGGRAPH Asia 2013)
3D printers have become popular in recent years and enable fabrication of custom objects for home users. However, the cost of the material used in printing remains high. In this paper, we present an automatic solution to design a skin-frame structure for the purpose of reducing the material cost in printing a given 3D object. The frame structure is designed by an optimization scheme which significantly reduces material volume and is guaranteed to be physically stable, geometrically approximate, and printable. Furthermore, the number of struts is minimized by solving an l0 sparsity optimization. [...]
DOI
Paper
Page
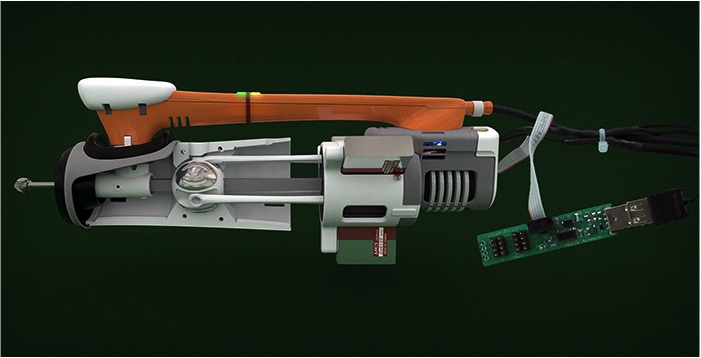
Human-computer interaction for hybrid carving (ACM UIST 2013)
In this paper we explore human-computer interaction for carving, building upon our previous work with
the FreeD digital sculpting device. We contribute a new tool design (FreeD V2), with a novel set of
interaction techniques for the fabrication of static models:
personalized tool paths, manual overriding, and physical merging of virtual models. [...]
DOI
Paper
Video
Page

Sauron: embedded single-camera sensing of printed physical user interfaces (ACM UIST 2013)
We present Sauron, an embedded machine vision-based system for sensing human input on physical controls like buttons, sliders, and joysticks.
With Sauron, designers attach a single camera with integrated ring light to a printed prototype. [...]
DOI
Paper
Video
Page
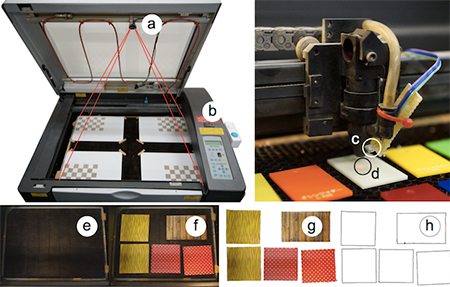
PacCAM: material capture and interactive 2D packing for efficient material usage on CNC cutting machines (ACM UIST 2013)
In this paper, we introduce PacCAM, a system for packing 2D parts within a given source material
for fabrication using 2D cutting machines. Our solution combines computer vision to
capture the source material shape with a user interface that incorporates 2D rigid body simulation and snapping. [...]
DOI
Paper
Video
Page
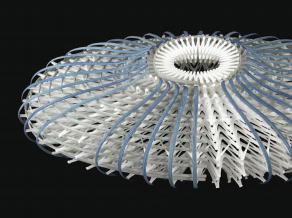
Hybrid basketry: interweaving digital practice within contemporary craft (ACM SIGGRAPH 2013)
In this paper, the author argues for merging these two distinct traditions. To that end, he developed hybrid basketry, a medium where 3D-printed structures are shaped to allow the growth and development of hand-woven patterns. While the 3D-printed plastic elements contribute the aesthetics of the digital curvatures and manifolds, the hand-woven reed, jute, and canvas fibers infuse the baskets with a unique organic appeal. [...] DOI Paper Video Page
In this paper, the author argues for merging these two distinct traditions. To that end, he developed hybrid basketry, a medium where 3D-printed structures are shaped to allow the growth and development of hand-woven patterns. While the 3D-printed plastic elements contribute the aesthetics of the digital curvatures and manifolds, the hand-woven reed, jute, and canvas fibers infuse the baskets with a unique organic appeal. [...] DOI Paper Video Page

OpenFab: a programmable pipeline for multi-material fabrication (ACM SIGGRAPH 2013)
We present OpenFab, a programmable pipeline for synthesis of multi-material 3D printed objects that is
inspired by RenderMan and modern GPU pipelines. The pipeline supports procedural evaluation of
geometric detail and material composition, using shader-like fablets, allowing models to be specified
easily and efficiently. [...]
DOI
Paper
Page
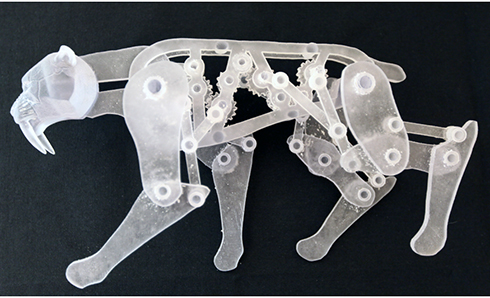
Computational Design of Mechanical Characters (ACM SIGGRAPH 2013)
We present an interactive design system that allows non-expert users to create animated mechanical characters. Given an articulated character as input, the user iteratively creates an animation by sketching motion curves indicating how different parts of the character should move. For each motion curve, our framework creates an optimized mechanism that reproduces it as closely as possible. [...]
DOI Paper Video Page
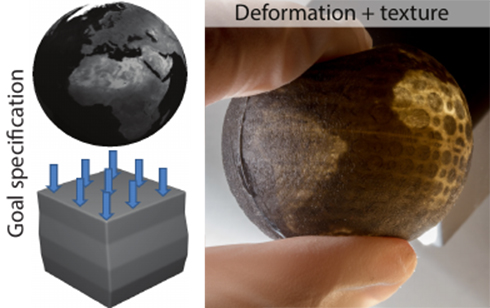
Spec2Fab: a reducer-tuner model for translating specifications to 3D prints (ACM SIGGRAPH 2013)
In this paper, we propose an abstraction mechanism that simplifies the design, development, implementation, and reuse of these algorithms. Our solution relies on two new data structures: a reducer tree that efficiently parameterizes the space of material assignments and a tuner network that describes the optimization process used to compute material arrangement. [...]
DOI
Paper
Video
Page

Computational design of actuated deformable characters (ACM SIGGRAPH 2013)
We present a method for fabrication-oriented design of actuated deformable characters that allows a user to automatically create physical replicas of digitally designed characters using rapid manufacturing technologies. Given a deformable character and a set of target poses as input, our method computes a small set of actuators along with their locations on the surface and optimizes the internal material distribution such that the resulting character exhibits the desired deformation behavior. [...]
DOI
Paper
Video
Page
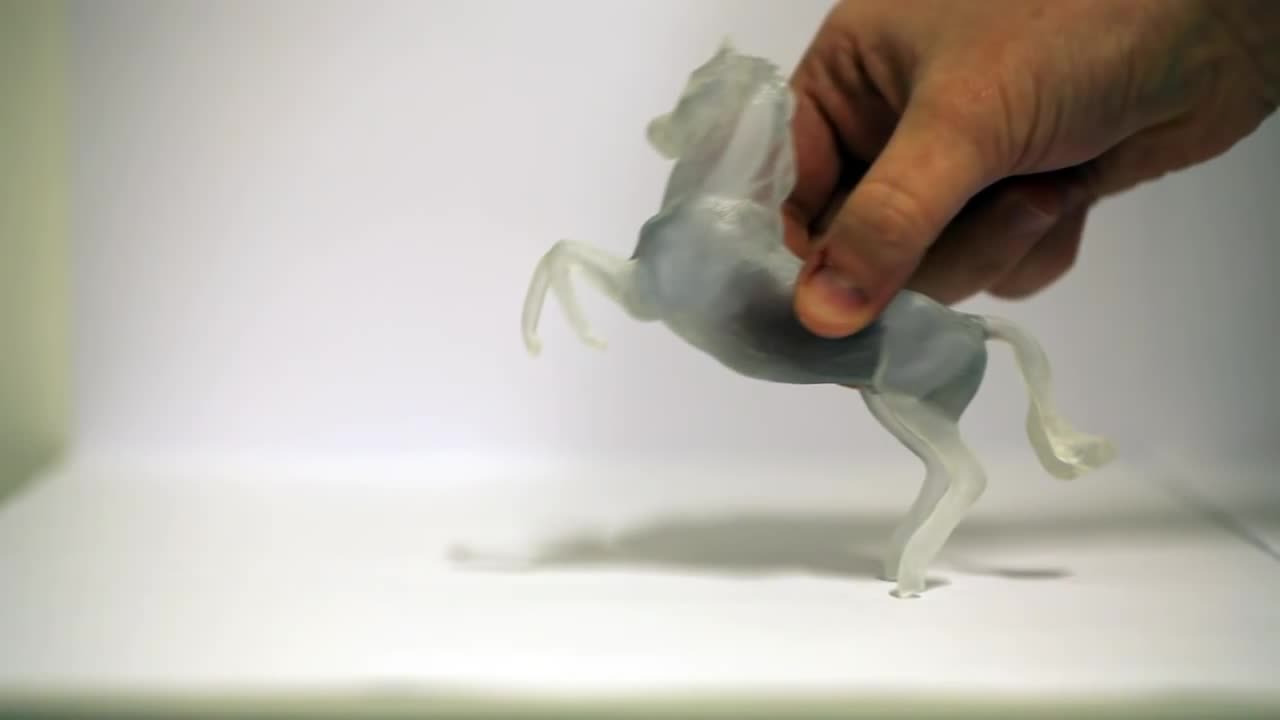
Make it stand: balancing shapes for 3D fabrication (ACM SIGGRAPH 2013)
We propose to assist users in producing novel, properly balanced designs by interactively deforming an existing model. We formulate balance optimization as an energy minimization, improving stability by modifying the volume of the object, while preserving its surface details. This takes place during interactive editing: the user cooperates with our optimizer towards the end result. [...]
DOI
Paper
Video
Page

Worst-case structural analysis (ACM SIGGRAPH 2013)
We present a method that would identify structural problems in objects designed for 3D printing based on geometry and material properties only, without specific assumptions on loads and manual load setup. We solve a constrained optimization problem to determine the "worst" load distribution for a shape that will cause high local stress or large deformations. While in its general form this optimization has a prohibitively high computational cost, we demonstrate that an approximate method makes it possible to solve the problem rapidly for a broad range of printed models. [...]
DOI
Paper
Page
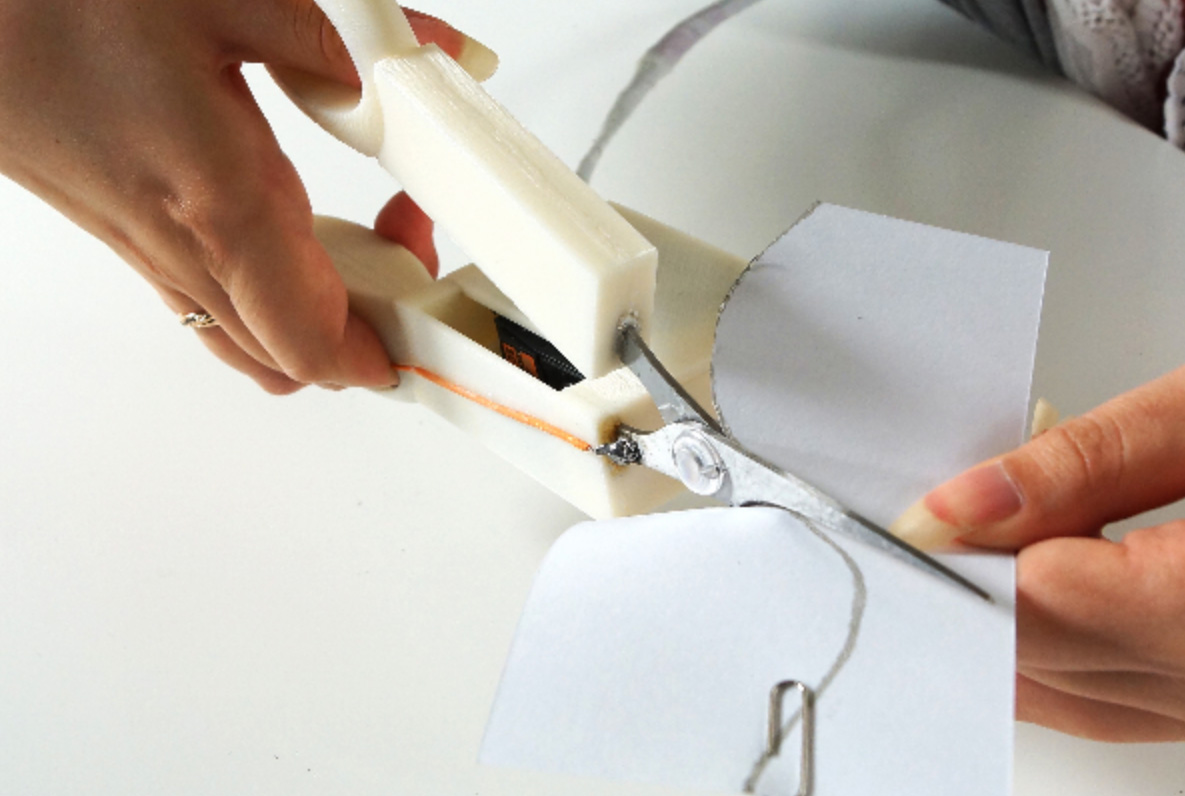
Enchanted scissors: a scissor interface for support in cutting and interactive fabrication (ACM SIGGRAPH 2013)
We present an approach to support basic and complex cutting processes through an interactive fabrication experience [Willis et al. 2011]. Our system, enchanted scissors, is a digitally controlled pair of scissors (Figure 1). It restricts areas that can be cut while requiring the user's exertion of force and decision to execute each cut. Therefore, unlike a completely digitalized cutting device, the user can freely apply improvisations within the permitted areas in real-time.[...]
DOI
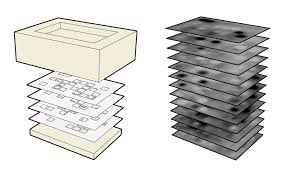
InfraStructs: fabricating information inside physical objects for imaging in the terahertz region (ACM SIGGRAPH 2013)
We introduce InfraStructs, material-based tags that embed information inside digitally fabricated objects for imaging in the Terahertz region. Terahertz imaging can safely penetrate many common materials, opening up new possibilities for encoding hidden information as part of the fabrication process. We outline the design, fabrication, imaging, and data processing steps to fabricate information inside physical objects. [...]
DOI
Paper
Video
Page

FreeD: a freehand digital sculpting tool (ACM CHI 2013)
In this paper, we present an approach to combining digital fabrication and craft,
emphasizing the user experience. While many researchers strive to enable makers to
design and produce 3D objects, our research seeks to present a new fabrication
approach to make unique, one-of-a-kind artifacts.
To that end, we developed the FreeD, a hand-held digital milling device. [...]
DOI
Paper
Video
Page

LaserOrigami: laser-cutting 3D objects (ACM CHI 2013)
We present LaserOrigami, a rapid prototyping system that produces 3D objects using a laser cutter. LaserOrigami is substantially faster than traditional 3D fabrication techniques such as 3D printing and unlike traditional laser cutting the resulting 3D objects require no manual assembly. [...]
DOI
Paper
Video
Page

Fabrication-aware Design with Intersecting Planar Pieces (EUROGRAPHICS 2013)
We propose a computational design approach to generate 3D models composed of interlocking planar pieces.
We show how intricate 3D forms can be created by sliding the pieces into each other along straight slits,
leading to a simple construction that does not require glue, screws, or other means of support. [...]
DOI
Paper
Video
Page
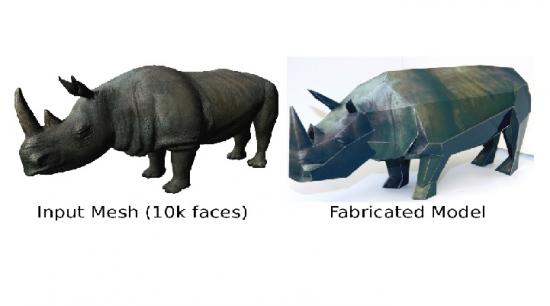
Computing and Fabricating Multiplanar Models (EUROGRAPHICS 2013)
Our shape approximation algorithm iteratively assigns mesh faces to planar segments and slowly deforms these faces towards corresponding segments. This approach ensures that the output for a given closed mesh is still a closed mesh and avoids introducing self-intersections. [...]
DOI
Paper
Video
Page

Computational Fabrication and Display of Material Appearance (EUROGRAPHICS 2013)
In this report, we summarize research efforts from the worlds of fabrication display, and categorize the different approaches into a common taxonomy. We believe that this report can serve as a basis for systematic exploration of the design space in future research. [...]
DOI
Paper
Page

Orthogonal slicing for additive manufacturing (COMPUTER AND GRAPHICS 2013)
Our approach then finds a compromise between modeling each part of the shape individually in
the best possible direction and using one direction for the whole shape part.
In particular, we compute an orthogonal
basis and consider only the three basis vectors as slice normals (i.e. fabrication directions). [...]
DOI
Paper
Page

Enclosed: a component-centric interface for designing prototype enclosures (ACM TEI 2013)
This paper explores the problem of designing enclosures (or physical cases) that are needed for prototyping electronic devices.
We present a novel interface that uses electronic components as handles for designing the 3D shape of the enclosure. [...]
DOI
Paper
2012
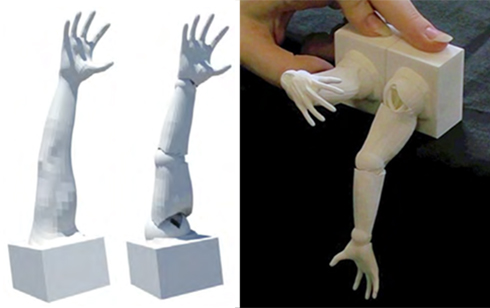
3D-printing of non-assembly, articulated models (ACM SIGGRAPH Asia 2012)
In this paper, we propose a method for converting 3D models into printable, functional, non-assembly models with internal friction. To this end, we have designed an intuitive work-flow that takes an appropriately rigged 3D model, automatically fits novel 3D-printable and posable joints, and provides an interface for specifying rotational constraints. We show a number of results for different articulated models, demonstrating the effectiveness of our method. [...]
DOI
Paper
Page

Chopper: partitioning models into 3D-printable parts (ACM SIGGRAPH Asia 2012)
3D printing technology is rapidly maturing and becoming ubiquitous. One of the remaining obstacles to wide-scale adoption is that the object to be printed must fit into the working volume of the 3D printer. We propose a framework, called Chopper, to decompose a large 3D object into smaller parts so that each part fits into the printing volume. These parts can then be assembled to form the original object. [...]
DOI
Paper
Page
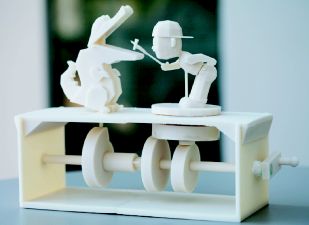
Motion-guided mechanical toy modeling (ACM SIGGRAPH Asia 2012)
We introduce a new method to synthesize mechanical toys solely from the motion of their features. The designer specifies the geometry and a time-varying rotation and translation of each rigid feature component. Our algorithm automatically generates a mechanism assembly located in a box below the feature base that produces the specified motion. Parts in the assembly are selected from a parameterized set including belt-pulleys, gears, crank-sliders, quick-returns, and various cams (snail, ellipse, and double-ellipse). [...]
DOI
Paper
Video
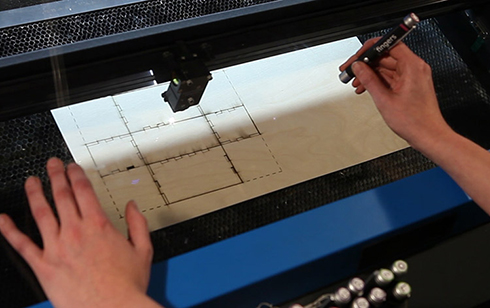
Interactive Construction: Interactive Fabrication of Functional Mechanical Devices (ACM UIST 2012)
Constructable is an interactive drafting table that produces precise physical output in every step. Users interact by drafting directly on the workpiece using a hand-held laser pointer. The system tracks the pointer, beautifies its path, and implements its effect by cutting the workpiece using a fast high-powered laser cutter. [...]
DOI
Paper
Video
Page
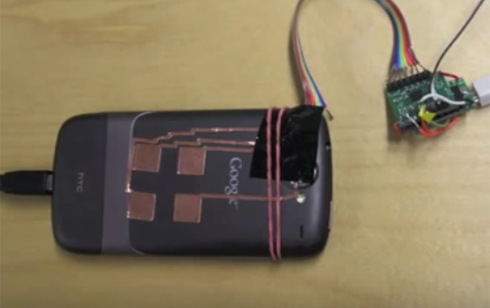
Midas: fabricating custom capacitive touch sensors to prototype interactive objects (ACM UIST 2012)
An increasing number of consumer products include user interfaces that rely on touch input. While digital fabrication techniques such as 3D printing make it easier to prototype the shape of custom devices, adding interactivity to such prototypes remains a challenge for many designers. We introduce Midas, a software and hardware toolkit to support the design, fabrication, and programming of flexible capacitive touch sensors for interactive objects. [...]
DOI
Paper
Video
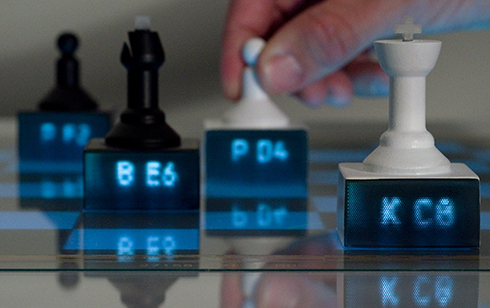
Printed optics: 3D printing of embedded optical elements for interactive devices (ACM UIST 2012)
An increasing number of consumer products include user interfaces that rely on touch input. While digital fabrication techniques such as 3D printing make it easier to prototype the shape of custom devices, adding interactivity to such prototypes remains a challenge for many designers. We introduce Midas, a software and hardware toolkit to support the design, fabrication, and programming of flexible capacitive touch sensors for interactive objects. [...]
DOI
Paper
Video
Page
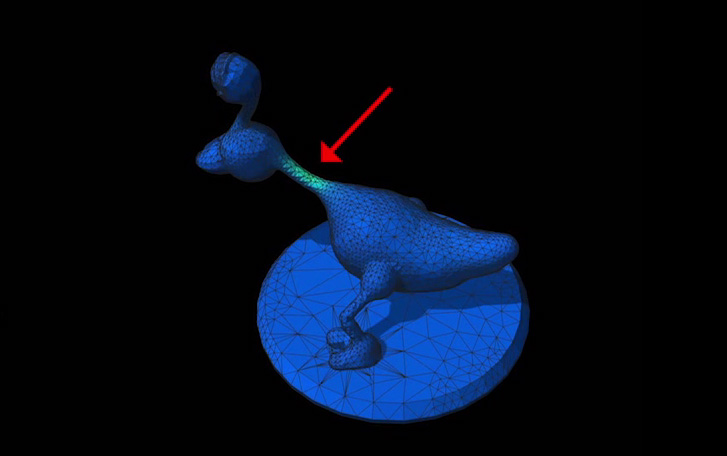
Stress relief: improving structural strength of 3D printable objects (ACM SIGGRAPH 2012)
We developed a system that addresses the printability issues by providing automatic detection and correction of the problematic cases.
Our system detects potential problematic cases by considering gravity and gripping forces by evaluating most possible places on the object where it can be held. [...]
DOI Paper
Video
Page

Fabricating articulated characters from skinned meshes (ACM SIGGRAPH 2012)
Articulated deformable characters are widespread in computer animation. Unfortunately, we lack methods for their automatic fabrication using modern additive manufacturing (AM) technologies. We propose a method that takes a skinned mesh as input, then estimates a fabricatable single-material model that approximates the 3D kinematics of the corresponding virtual articulated character in a piecewise linear manner. [...]
DOI
Paper
Video
Page

Physical Face Cloning (ACM SIGGRAPH 2012)
We propose a complete process for designing, simulating, and fabricating synthetic skin for an animatronics character that mimics the face of a given subject and its expressions. The process starts with measuring the elastic properties of a material used to manufacture synthetic soft tissue. Given these measurements we use physics-based simulation to predict the behavior of a face when it is driven by the underlying robotic actuation. [...]
DOI
Paper
Video Page

Position-correcting tools for 2D digital fabrication (ACM SIGGRAPH 2012)
We propose a new approach to precise positioning of a tool that combines manual and automatic positioning: in our approach, the user coarsely positions a frame containing the tool in an approximation of the desired path, while the device tracks the frame's location and adjusts the position of the tool within the frame to correct the user's positioning error in real time. [...]
DOI
Paper
Video
Page
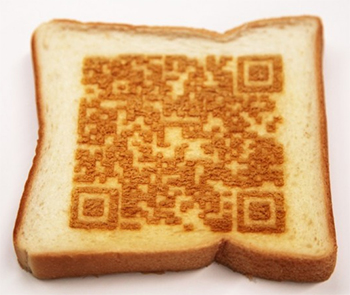
Laser cooking: a novel culinary technique for dry heating using a laser cutter and vision technology (CEA 2012)
We propose a novel cooking technology that uses a laser cutter as a dry-heating device.
In general, dry-heat cooking heats the whole surface of an ingredient, while a laser cutter heats a small
spot of the surface in a very short time. Our approach employs a computer-controlled laser cutter and a video
image-processing technique to cook ingredients according to their shape and composition, allowing for new tastes,
textures, decorations, and engraving unique identifiers to the ingredients. [...]
DOI
Page

DressUp: a 3D interface for clothing design with a physical mannequin (ACM TEI 2012)
This paper introduces DressUp, a computerized system for designing dresses with
3D input using the form of the human body as a guide. It consists of a body-sized physical mannequin,
a screen, and tangible prop tools for drawing in 3D on and around the mannequin. As the user draws,
he/she modifies or creates pieces of digital cloth,
which are displayed on a model of the mannequin on the screen. [...]
DOI
Paper
Video
Page
2011
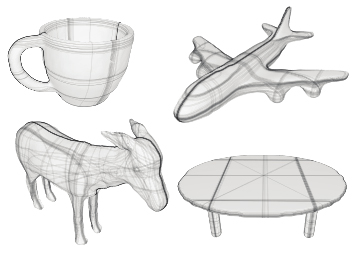
Slices: a shape-proxy based on planar sections (ACM SIGGRAPH Asia 2011)
We explore the use of planar sections, i.e., the contours of intersection of planes with a 3D object, for creating shape abstractions, motivated by their popularity in art and engineering. We first perform a user study to show that humans do define consistent and similar planar section proxies for common objects. Interestingly, we observe a strong correlation between user-defined planes and geometric features of objects. [...]
DOI
Paper
Page

Sensitive Couture for Interactive Garment Editing and Modeling (ACM SIGGRAPH 2011)
We present a novel interactive tool for garment design that enables, for the first time,
interactive bidirectional editing between 2D patterns and 3D high-fidelity simulated draped forms.
This provides a continuous, interactive, and natural design modality in which 2D and 3D representations are
simultaneously visible and seamlessly maintain correspondence. [...]
DOI
Paper
Video
Page
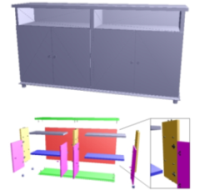
Converting 3D furniture models to fabricatable parts and connectors (ACM SIGGRAPH 2011)
Although there is an abundance of 3D models available, most of them exist only in virtual simulation and are not immediately usable as physical objects in the real world. We solve the problem of taking as input a 3D model of a man-made object, and automatically generating the parts and connectors needed to build the corresponding physical object. We focus on furniture models, and we define formal grammars for IKEA cabinets and tables. We perform lexical analysis to identify the primitive parts of the 3D model. [...]
DOI
Paper
Video
Page
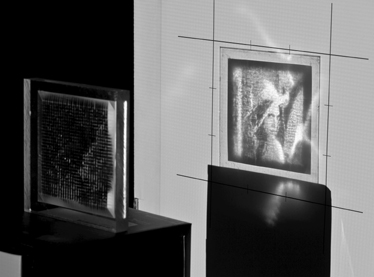
GOAL-BASED CAUSTICS (EUROGRAPHICS 2011, Computer Graphics Forum)
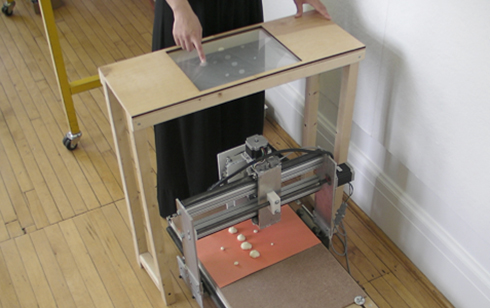
Interactive fabrication: new interfaces for digital fabrication (TEI 2011)
We present a series of prototype devices that use real-time input to fabricate physical form: Interactive Fabrication. Our work maps out the problem space of real-time control for digital fabrication devices, and examines where alternative interfaces for digital fabrication are relevant. We conclude by reflecting upon the potential of interactive fabrication and outline a number of considerations for future research in this area. [...]
DOI
Paper
Video
Page

SketchChair: an all-in-one chair design system for end users (ACM TEI 2011)
SketchChair is an application that allows novice users to control the entire process of designing and building their own chairs. Chairs are designed using a simple 2D sketch-based interface and design validation tools, and are then fabricated from sheet materials, cut by a laser cutter or CNC milling machine. [...]
DOI
Paper
Video
Page
2010
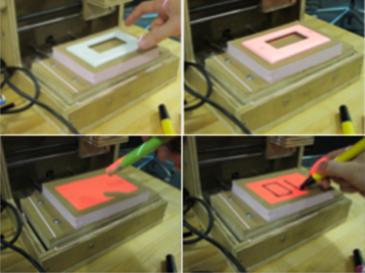
CopyCAD: remixing physical objects with copy and paste from the real world (ACM UIST 2010)
This paper introduces a novel technique for integrating geometry from physical objects into computer aided design (CAD) software. We allow users to copy arbitrary real world object geometry into 2D CAD designs at scale through the use of a camera/projector system. [...]
DOI
Paper

Design and Fabrication of Materials with Desired Deformation Behavior (ACM SIGGRAPH 2010)
This paper introduces a data-driven process for designing and fabricating materials with desired deformation behavior. Our process starts with measuring deformation properties of base materials. For each base material we acquire a set of example deformations, and we represent the material as a non-linear stress-strain relationship in a finite-element model. [...]
DOI
Paper
Video
Page

Fabricating spatially-varying subsurface scattering (ACM SIGGRAPH 2010)
In this paper, we present a complete solution for fabricating a material volume with a desired surface BSSRDF. We stack layers from a fixed set of manufacturing materials whose thickness is varied spatially to reproduce the heterogeneity of the input BSSRDF. [...]
DOI
Paper
Video
Page

Physical Reproduction of Materials with Specified Subsurface Scattering (ACM SIGRAPH 2010)
We describe a mathematical model that predicts the profiles of different stackings of base materials, at arbitrary thicknesses. In an inverse process, we can then specify a desired reflection profile and compute a layered composite material that best approximates it. Our algorithm efficiently searches the space of possible combinations of base materials, pruning unsatisfactory states imposed by physical constraints. We validate our process by producing both homogeneous and heterogeneous composites fabricated using a multi-material 3D printer. [...]
DOI
Paper
Page
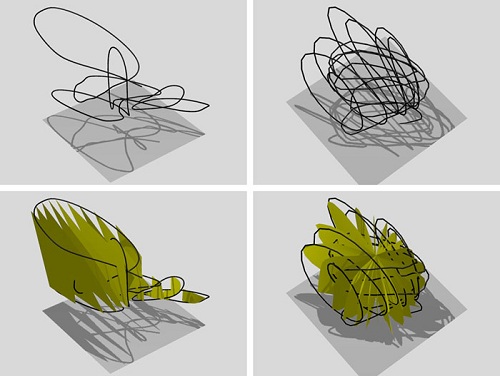
Spatial sketch: bridging between movement & fabrication (ACM TEI 2010)
This paper explores the rationale and details behind the development of the Spatial Sketch application,
and presents our observations from user testing and a hands-on lamp shade design workshop.
Finally we reflect upon the relevance of
embodied forms of human computer interaction for use in digital fabrication. [...]
DOI
Paper
Video
Page

Designing Custommade Metallophone with Concurrent Eigenanalysis (NIME 2010)
We introduce an interactive interface for the custom design of metallophones.
The shape of each plate must be determined
in the design process so that the metallophone will produce the proper tone when struck with a mallet.
Our system addresses this problem by running a concurrent numerical eigenanalysis during interactive geometry editing. [...]
Paper
Video
Page
2009
Fabricating microgeometry for custom surface reflectance (ACM SIGGRAPH 2009)
We propose a system for manufacturing physical surfaces that, in aggregate, exhibit a desired surface appearance.
Our system begins with a user specification of a BRDF, or simply a highlight shape,
and infers the required distribution of surface slopes.
We demonstrate a variety of surfaces, ranging from reproductions of measured BRDFs to materials with unconventional highlights.
[...]
DOI
Paper
Page
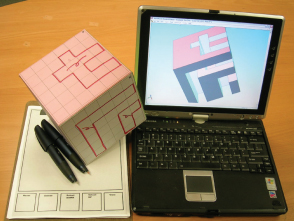
The ModelCraft framework: Capturing freehand annotations and edits to facilitate the 3D model design process using a digital pen (ACM CHI 2009, ACM ToCHI 2009)
ModelCraft supports a wide range of operations on complex models,
from editing a model to assembling multiple models, and offers physical tools to
capture free-space input. Several interviews and a formal study with the potential
users of our system proved the ModelCraft system useful. Our system is inexpensive,
requires no tracking infrastructure or per object calibration,
and we show how it could be extended seamlessly to use current 3D printing technology. [...]
DOI
Paper
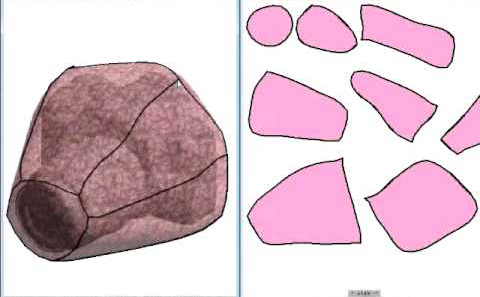
Interactive Cover Design Considering Physical Constraints (EUROGRAPHICS 2009)
We developed an interactive system to design a customized cover for a given three-dimensional (3D)
object such as a camera, teapot, or car. The system first computes the convex hull of the input geometry.
The user segments it into several cloth patches by drawing on the 3D surface. [...]
DOI
Paper
Video
Page
2007
Plushie: an interactive design system for plush toys (ACM SIGGRAPH 2007)
We introduce Plushie, an interactive system that allows nonprofessional users to design their own original plush toys. To design a plush toy, one needs to construct an appropriate two-dimensional (2D) pattern.
However, it is difficult for non-professional users to appropriately design a 2D pattern. [...]
DOI
Paper
Video
Page
2006

A compact factored representation of heterogeneous subsurface scattering (ACM SIGGRAPH 2006)
In this paper, we address the problem of acquiring and compactly representing the spatial component of heterogeneous subsurface scattering functions. We propose a material model based on matrix factorization that can be mapped onto arbitrary geometry, and, due to its compact form, can be incorporated into most visualization systems with little overhead. We present results of several real-world datasets that are acquired using a projector and a digital camera. [...]
DOI
Paper
Page
2004
Making papercraft toys from meshes using strip-based approximate unfolding (ACM SIGGRAPH 2004)
We propose a new method for producing unfolded papercraft patterns of rounded toy animal figures from triangulated meshes by means of strip-based approximation. Although in principle a triangulated model can be unfolded simply by retaining as much as possible of its connectivity while checking for intersecting triangles in the unfolded plane, creating a pattern with tens of thousands of triangles is unrealistic. Our approach is to approximate the mesh model by a set of continuous triangle strips with no internal vertices. Initially, we subdivide our mesh into parts corresponding to the features of the model. [...]
DOI
Paper